

Tapping into the human spinal locomotor centres with transspinal stimulation
- PMID: 38472313
- PMCID: PMC10933285
- DOI: 10.1038/s41598-024-56579-0
Tapping into the human spinal locomotor centres with transspinal stimulation
Abstract
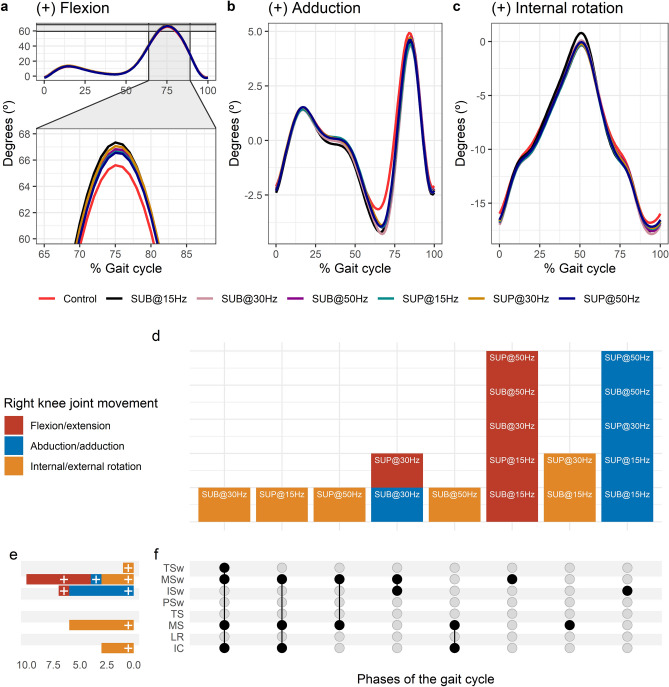
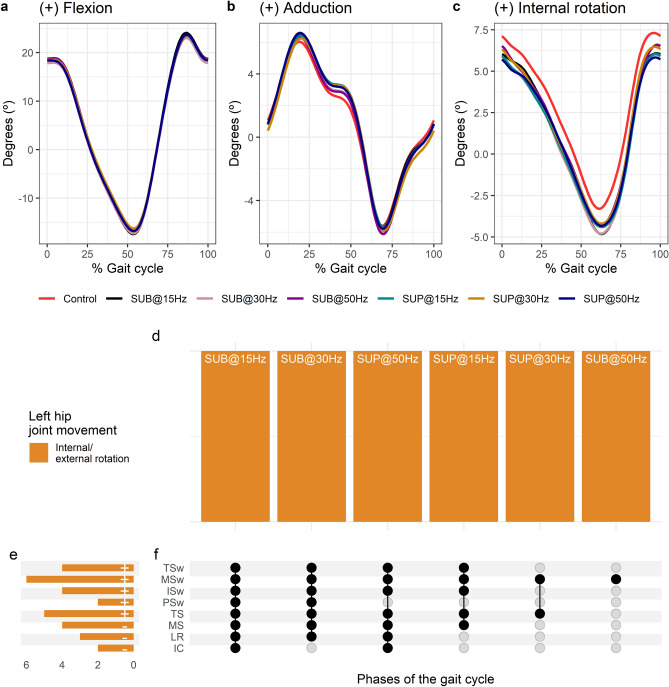
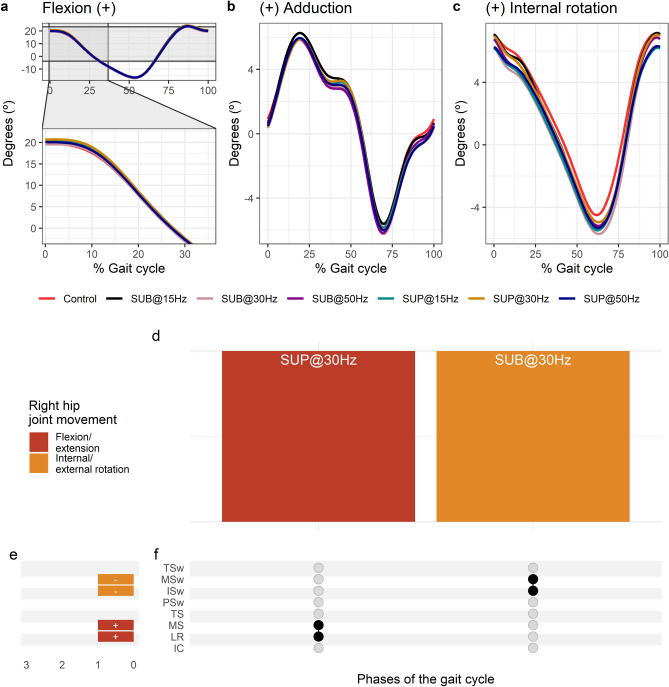
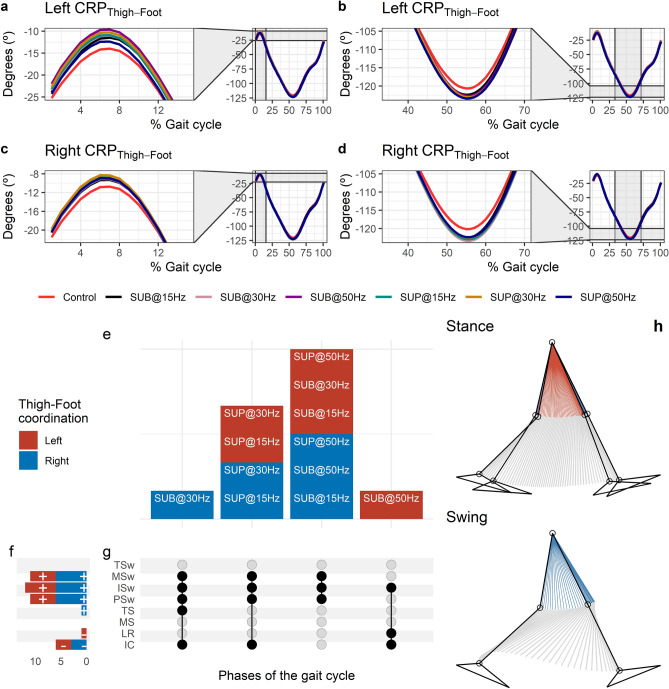
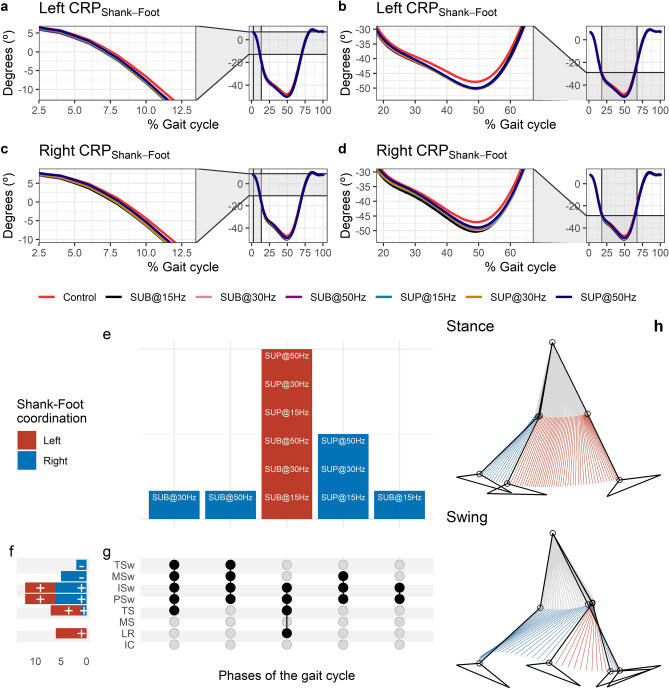
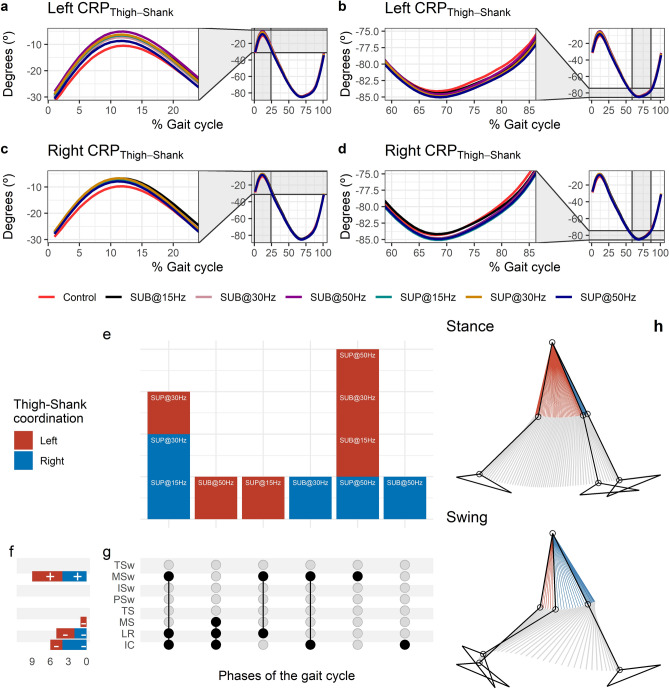
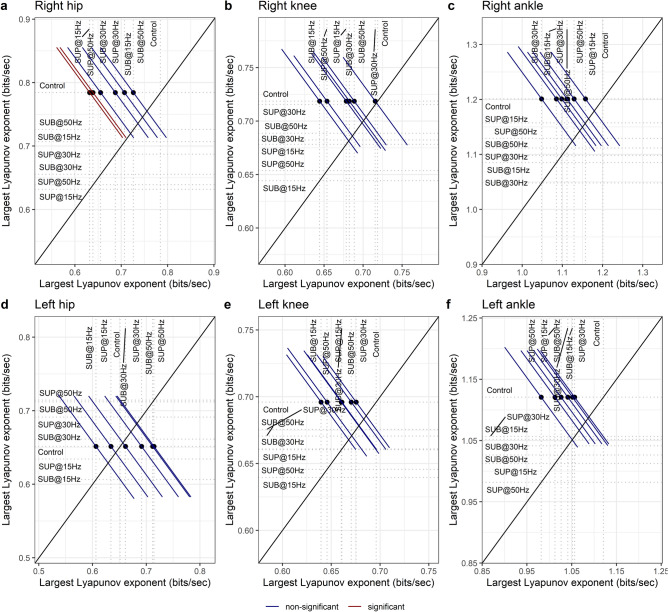
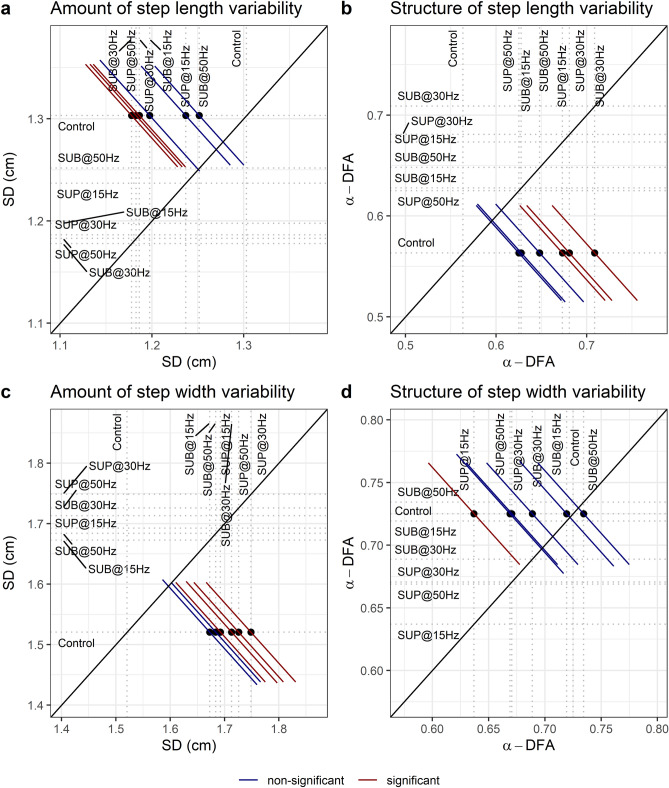
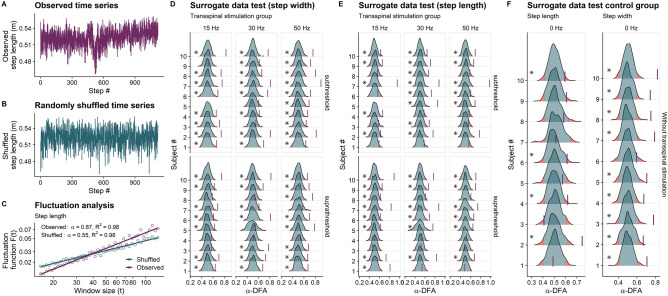
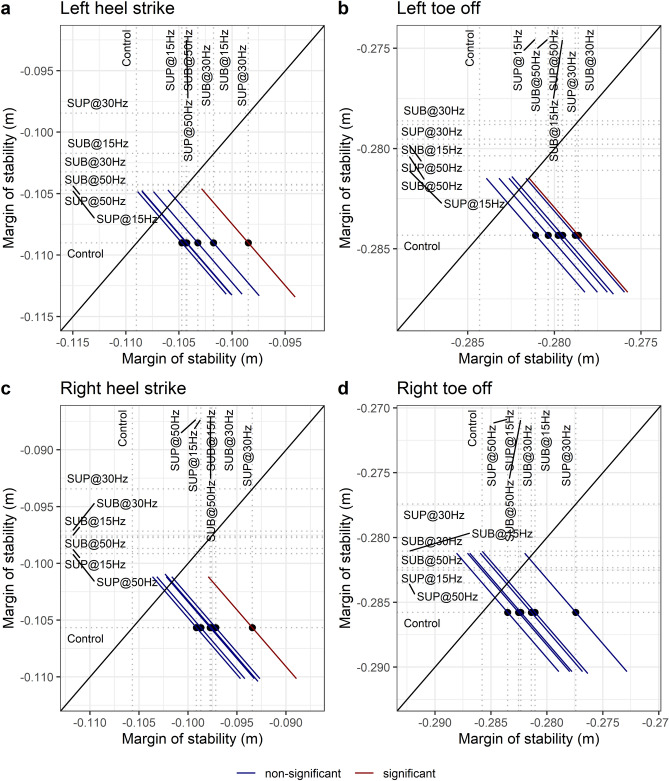
Human locomotion is controlled by spinal neuronal networks of similar properties, function, and organization to those described in animals. Transspinal stimulation affects the spinal locomotor networks and is used to improve standing and walking ability in paralyzed people. However, the function of locomotor centers during transspinal stimulation at different frequencies and intensities is not known. Here, we document the 3D joint kinematics and spatiotemporal gait characteristics during transspinal stimulation at 15, 30, and 50 Hz at sub-threshold and supra-threshold stimulation intensities. We document the temporal structure of gait patterns, dynamic stability of joint movements over stride-to-stride fluctuations, and limb coordination during walking at a self-selected speed in healthy subjects. We found that transspinal stimulation (1) affects the kinematics of the hip, knee, and ankle joints, (2) promotes a more stable coordination at the left ankle, (3) affects interlimb coordination of the thighs, and (4) intralimb coordination between thigh and foot, (5) promotes greater dynamic stability of the hips, (6) increases the persistence of fluctuations in step length variability, and lastly (7) affects mechanical walking stability. These results support that transspinal stimulation is an important neuromodulatory strategy that directly affects gait symmetry and dynamic stability. The conservation of main effects at different frequencies and intensities calls for systematic investigation of stimulation protocols for clinical applications.
Keywords: Dynamic stability; Interlimb coordination; Intralimb coordination; Locomotor networks; Motor control; Transspinal stimulation.
© 2024. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures





Update of
-
Tapping Into the Human Spinal Locomotor Centres With Transspinal Stimulation.Res Sq [Preprint]. 2024 Jan 2:rs.3.rs-3818499. doi: 10.21203/rs.3.rs-3818499/v1. Res Sq. 2024. Update in: Sci Rep. 2024 Mar 12;14(1):5990. doi: 10.1038/s41598-024-56579-0. PMID: 38260677 Free PMC article. Updated. Preprint.
References
-
- Grillner S. Control of locomotion in bipeds, tetrapods, and fish. In: Terjung R, editor. Comprehensive Physiology. Wiley; 2011. pp. 1179–1236.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
