

How Approaching Angle, Bottleneck Width and Walking Speed Affect the Use of a Bottleneck by Individuals
- PMID: 38543984
- PMCID: PMC10975616
- DOI: 10.3390/s24061720
How Approaching Angle, Bottleneck Width and Walking Speed Affect the Use of a Bottleneck by Individuals
Abstract
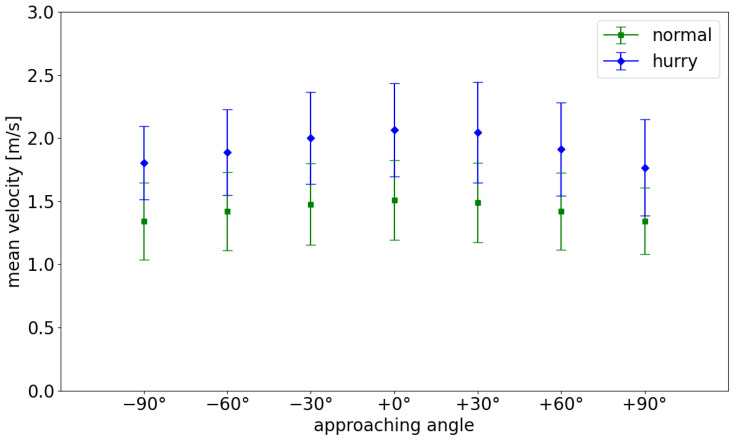
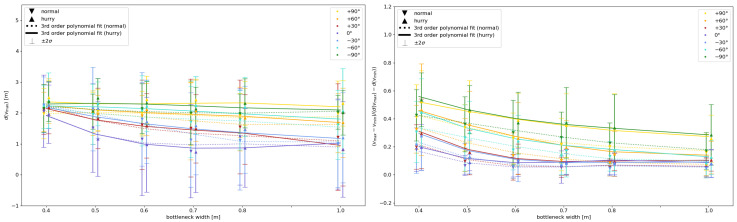
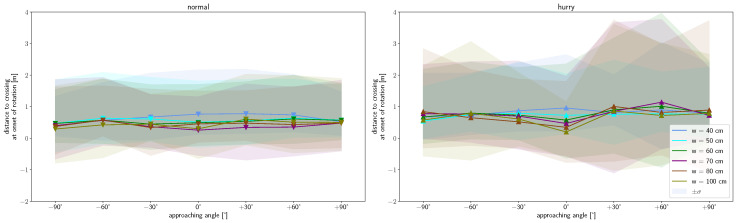
Understanding pedestrian dynamics at bottlenecks and how pedestrians interact with their environment-particularly how they use and move in the space available to them-is of safety importance, since bottlenecks are a key point for pedestrian flow. We performed a series of experiments in which participants walked through a bottleneck individually for varying combinations of approaching angle, bottleneck width and walking speed, to investigate the dependence of the movement on safety-relevant influencing factors. Trajectories as well as 3D motion data were recorded for every participant. This paper shows that (1) the maximum amplitude of shoulder rotation is mainly determined by the ratio of the bottleneck width to the shoulder width of the participant, while the direction is determined by the starting angle and the foot position; (2) the 'critical point' is not invariant to the starting angle and walking speed; (3) differences between the maximum and minimum speed values arise mainly from the distribution of deceleration patterns; and (4) the position of crossing shifts by 1.75 cm/10 cm, increasing the bottleneck width in the direction of origin.
Keywords: 3D motion capturing; bottleneck; bottleneck crossing; pedestrian movement; shoulder rotation.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures

















Similar articles
-
An exploratory study of pedestrian crossing speeds at midblock crossing in India using LiDAR.Traffic Inj Prev. 2022;23(1):61-66. doi: 10.1080/15389588.2021.2007527. Epub 2022 Jan 12. Traffic Inj Prev. 2022. PMID: 35020500
-
How do drivers overtake pedestrians? Evidence from field test and naturalistic driving data.Accid Anal Prev. 2020 May;139:105494. doi: 10.1016/j.aap.2020.105494. Epub 2020 Mar 20. Accid Anal Prev. 2020. PMID: 32203729
-
Kinematic cues in driver-pedestrian communication to support safe road crossing.Accid Anal Prev. 2023 Nov;192:107236. doi: 10.1016/j.aap.2023.107236. Epub 2023 Jul 31. Accid Anal Prev. 2023. PMID: 37531855
-
Cross or wait? Pedestrian decision making during clearance phase at signalized intersections.Accid Anal Prev. 2018 Feb;111:115-124. doi: 10.1016/j.aap.2017.08.019. Epub 2017 Dec 1. Accid Anal Prev. 2018. PMID: 29197691
-
Learning to interpret novel eHMI: The effect of vehicle kinematics and eHMI familiarity on pedestrian' crossing behavior.J Safety Res. 2022 Feb;80:270-280. doi: 10.1016/j.jsr.2021.12.010. Epub 2021 Dec 23. J Safety Res. 2022. PMID: 35249607
References
-
- Liddle J., Seyfried A., Steffen B., Klingsch W., Rupprecht T., Winkens A., Boltes M. Microscopic insights into pedestrian motion through a bottleneck, resolving spatial and temporal variations. Collect. Dyn. 2022;7:1–23. doi: 10.17815/CD.2022.139. - DOI
-
- Boltes M., Seyfried A. Collecting Pedestrian Trajectories. Neurocomputing Spec. Issue Behav. Video. 2013;100:127–133. doi: 10.1016/j.neucom.2012.01.036. - DOI
-
- Kretz T., Grünebohm A., Schreckenberg M. Experimental study of pedestrian flow through a bottleneck. J. Stat. Mech. Theory Exp. 2006;2006:P10014. doi: 10.1088/1742-5468/2006/10/P10014. - DOI
-
- Shi X., Ye Z., Shiwakoti N., Tang D., Lin J. Examining effect of architectural adjustment on pedestrian crowd flow at bottleneck. Phys. A Stat. Mech. Appl. 2019;522:350–364. doi: 10.1016/j.physa.2019.01.086. - DOI
-
- Yanagisawa D., Feliciani C., Nishinari K. Unidirectional and Bidirectional Flow in a Narrow Corridor with Body Rotation. Coll. Dyn. 2020;5:A37. doi: 10.17815/CD.2020.37. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
