

Fully automatic online geometric calibration for non-circular cone-beam CT orbits using fiducials with unknown placement
- PMID: 38573172
- PMCID: PMC11963847
- DOI: 10.1002/mp.17041
Fully automatic online geometric calibration for non-circular cone-beam CT orbits using fiducials with unknown placement
Abstract
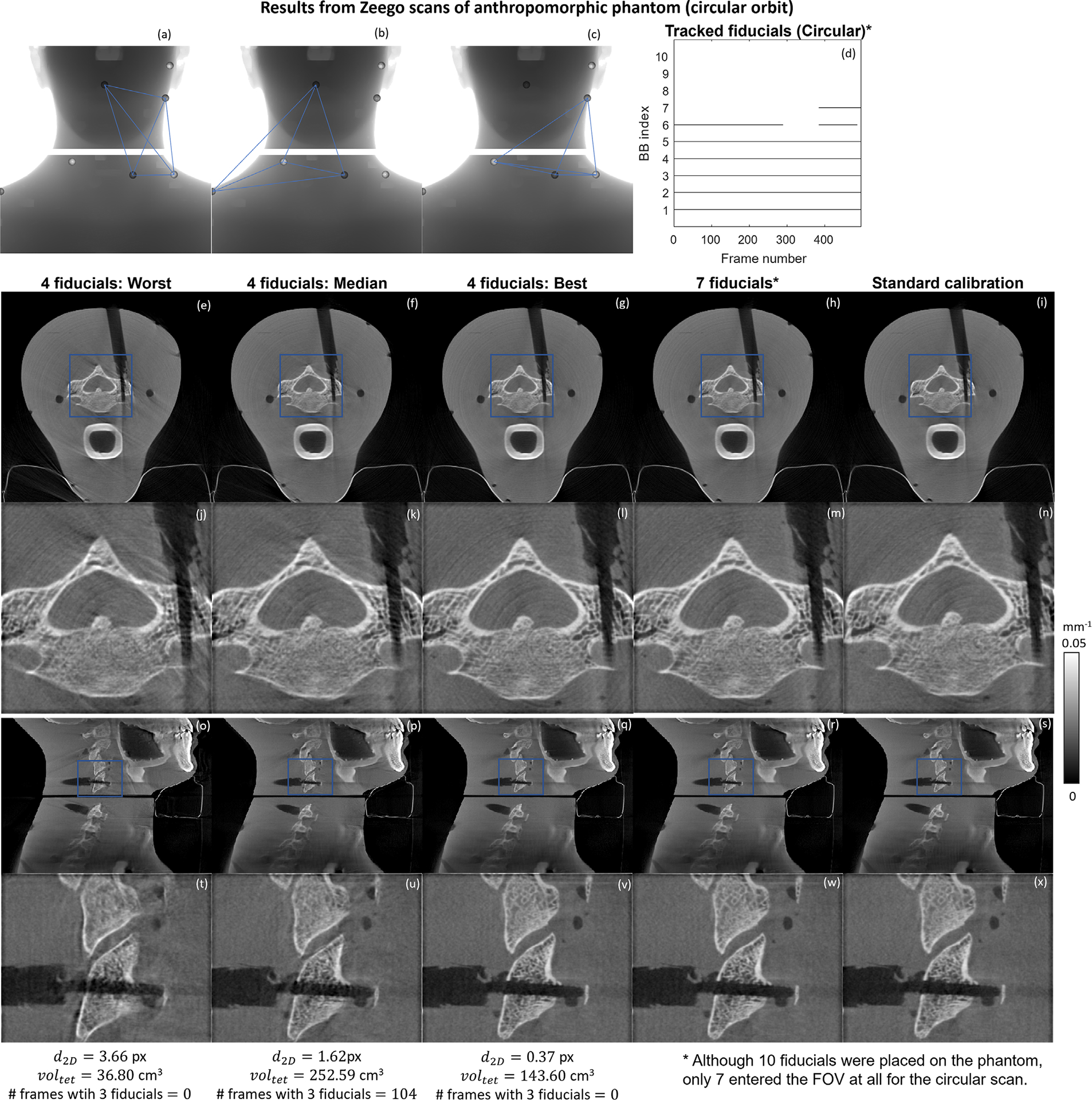
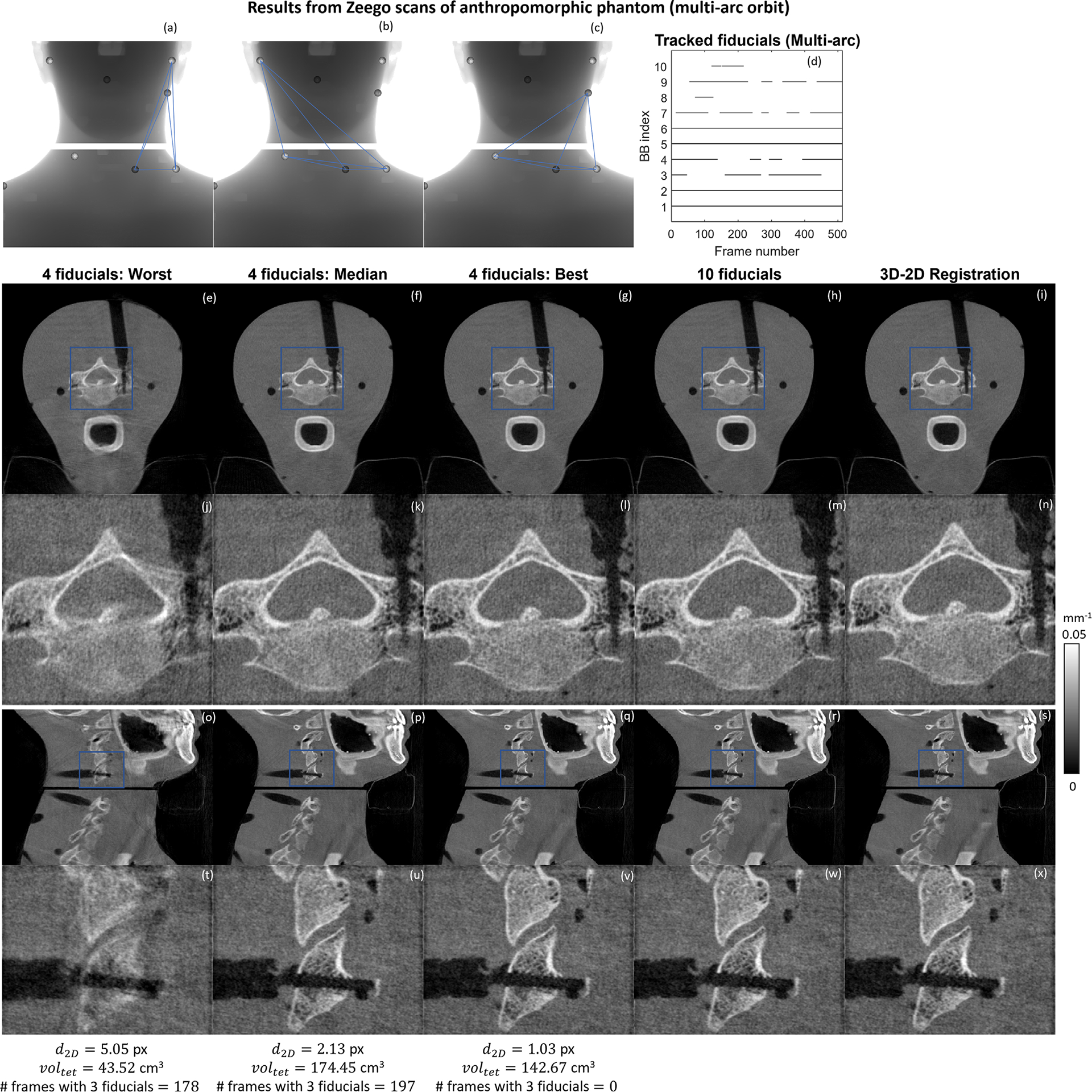
Background: Cone-beam CT (CBCT) with non-circular scanning orbits can improve image quality for 3D intraoperative image guidance. However, geometric calibration of such scans can be challenging. Existing methods typically require a prior image, specialized phantoms, presumed repeatable orbits, or long computation time.
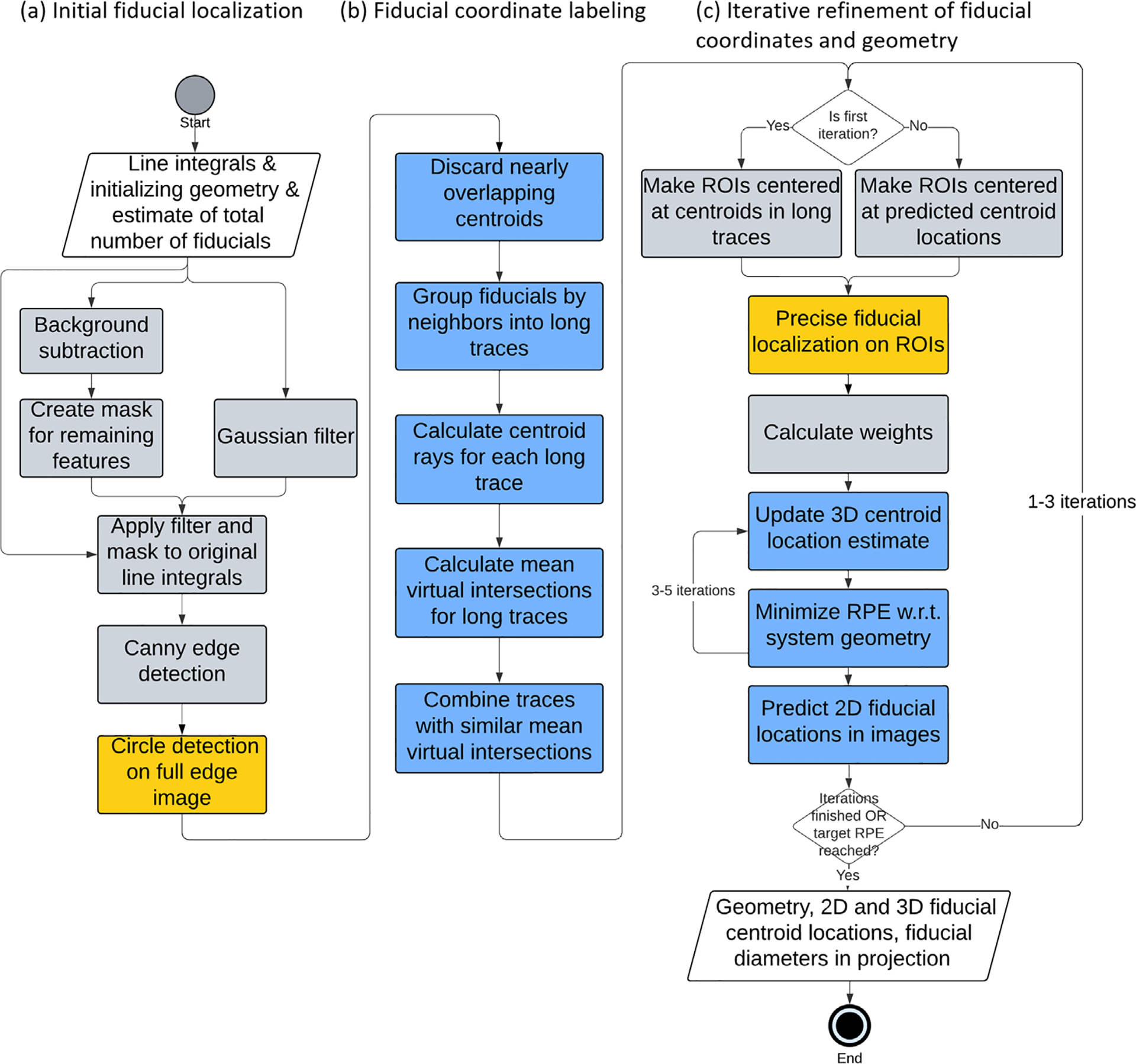
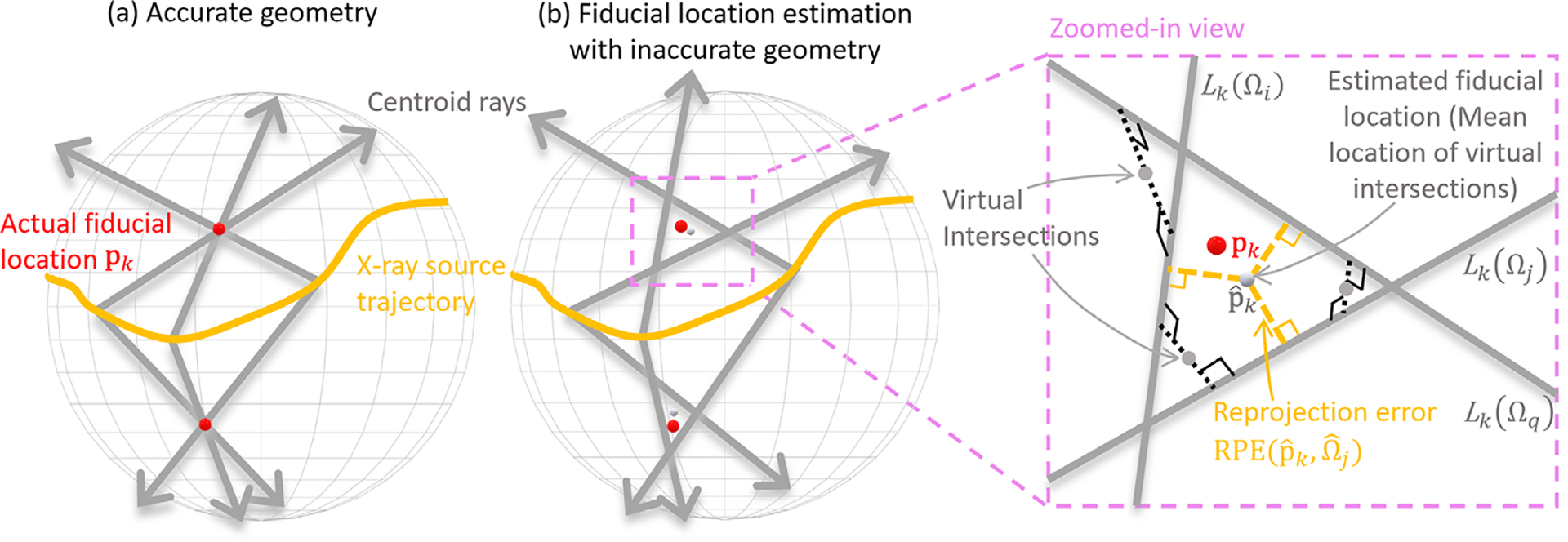
Purpose: We propose a novel fully automatic online geometric calibration algorithm that does not require prior knowledge of fiducial configuration. The algorithm is fast, accurate, and can accommodate arbitrary scanning orbits and fiducial configurations.
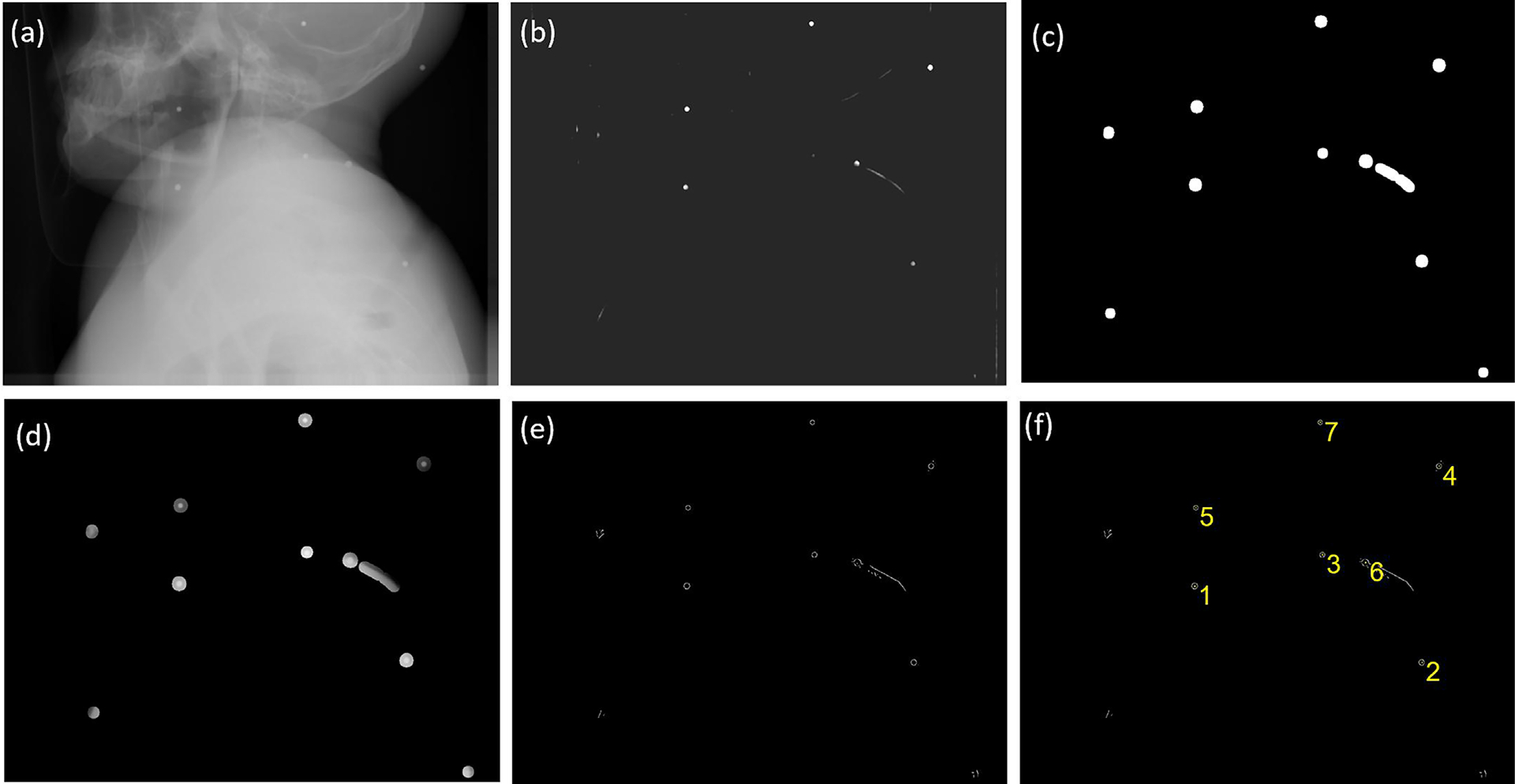
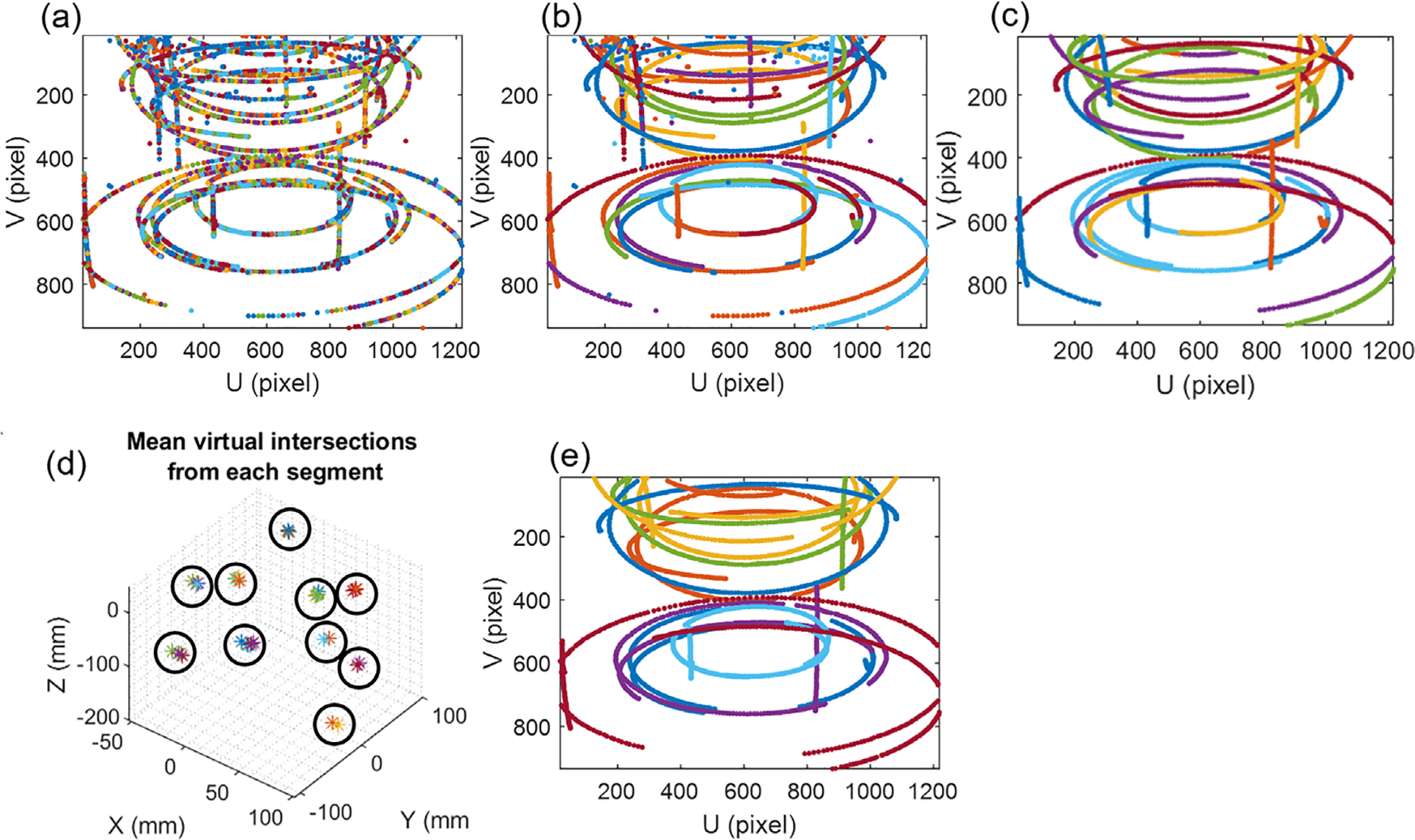
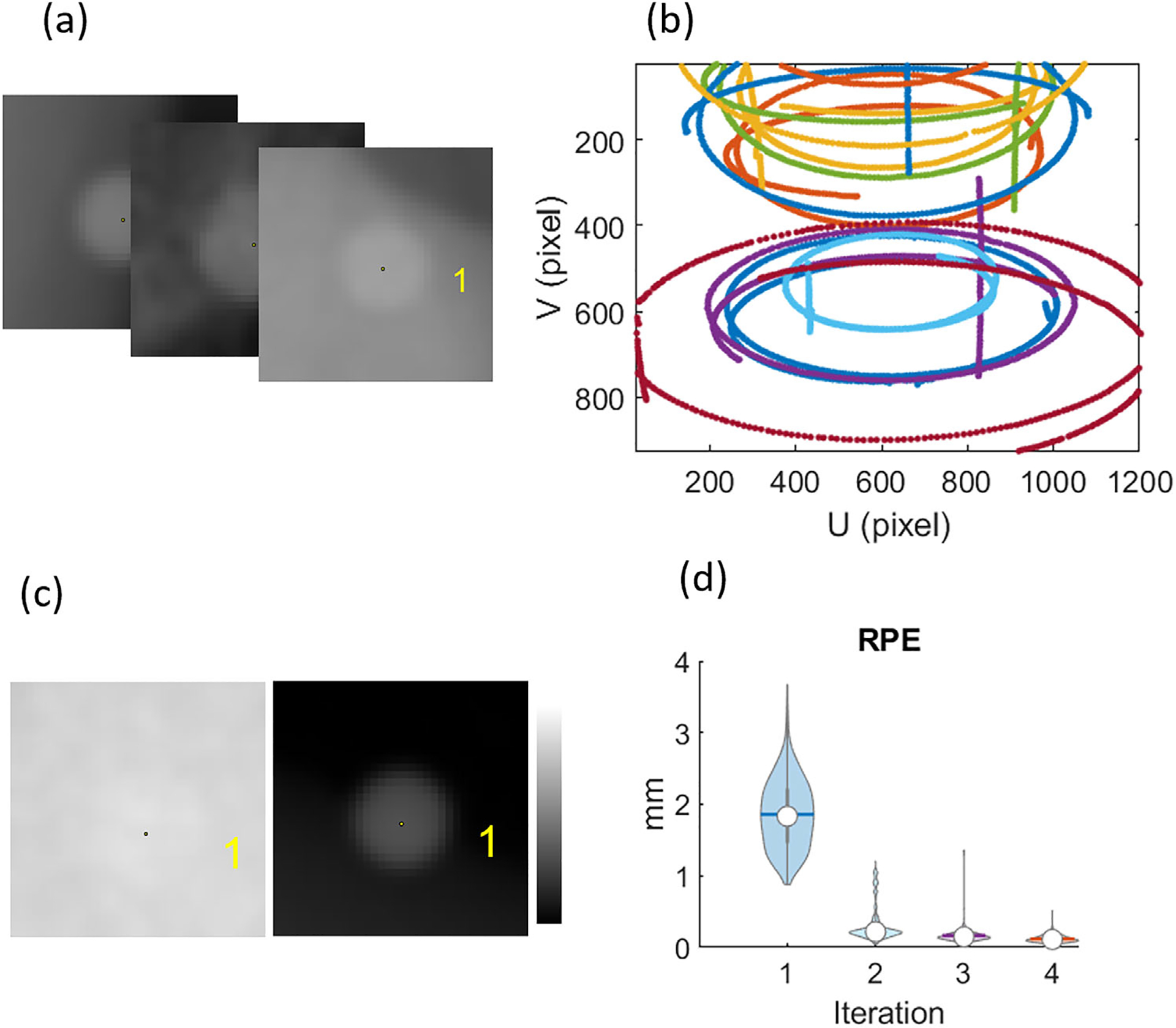
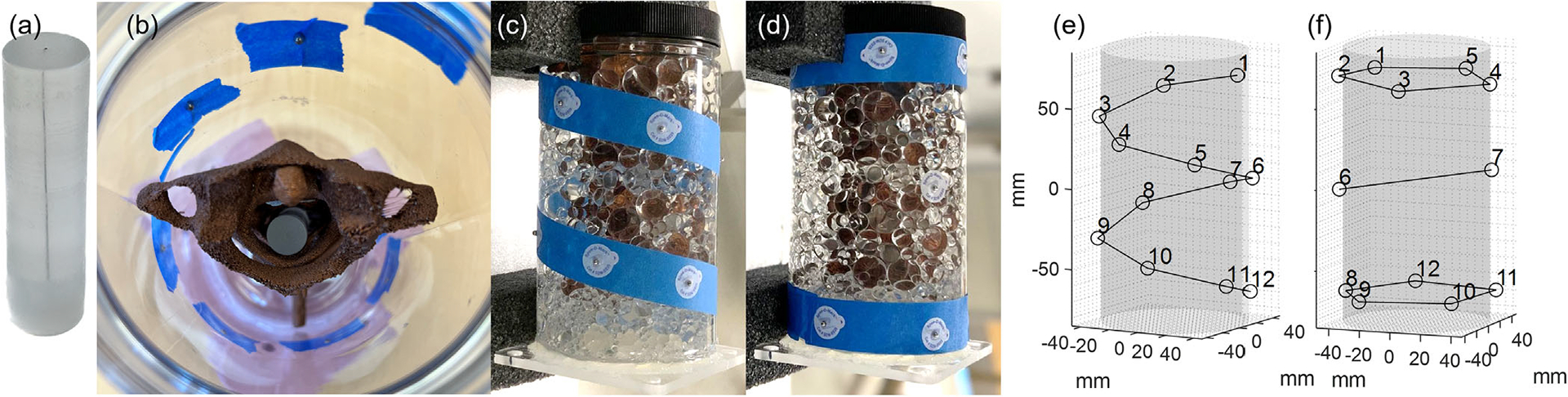
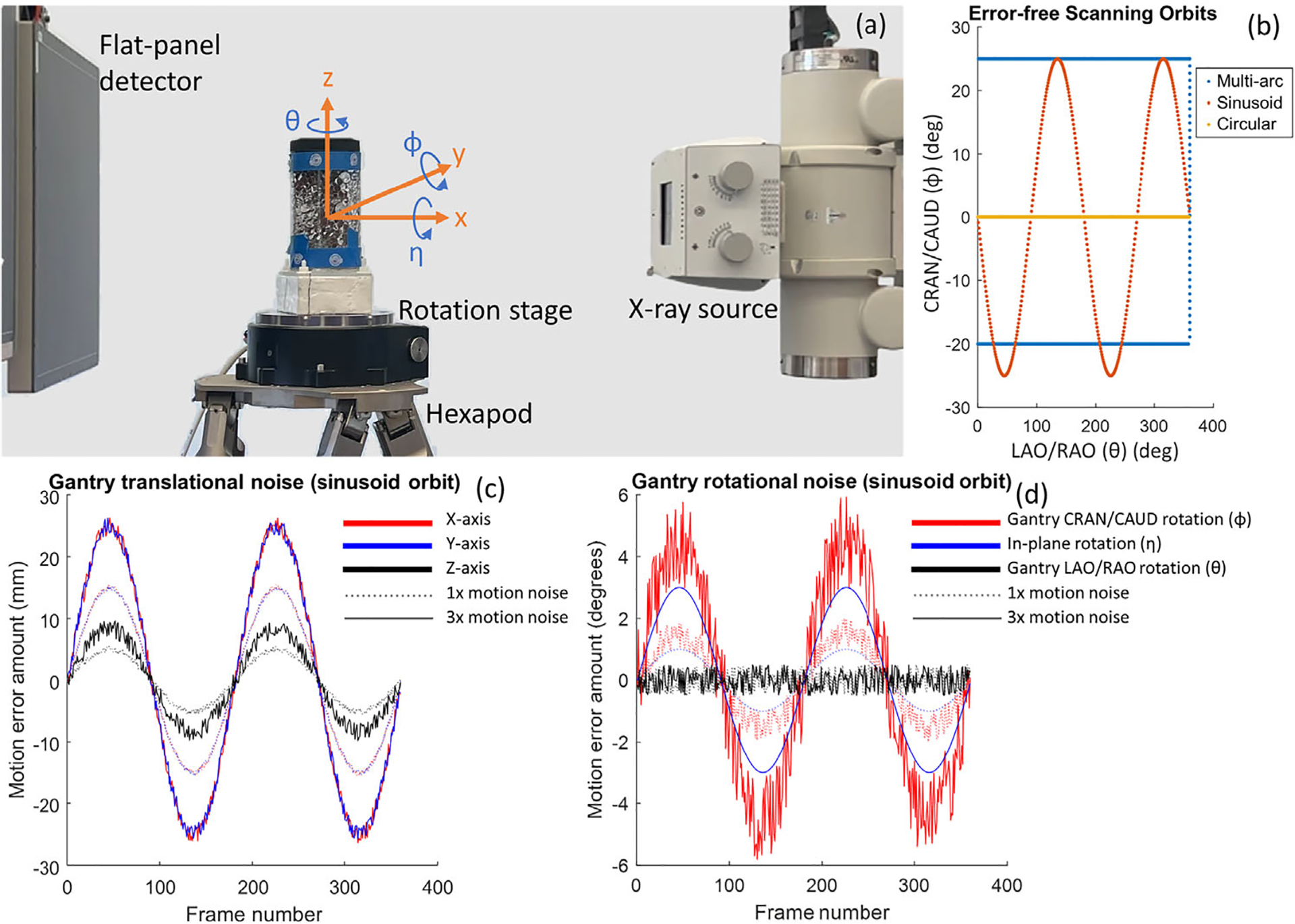
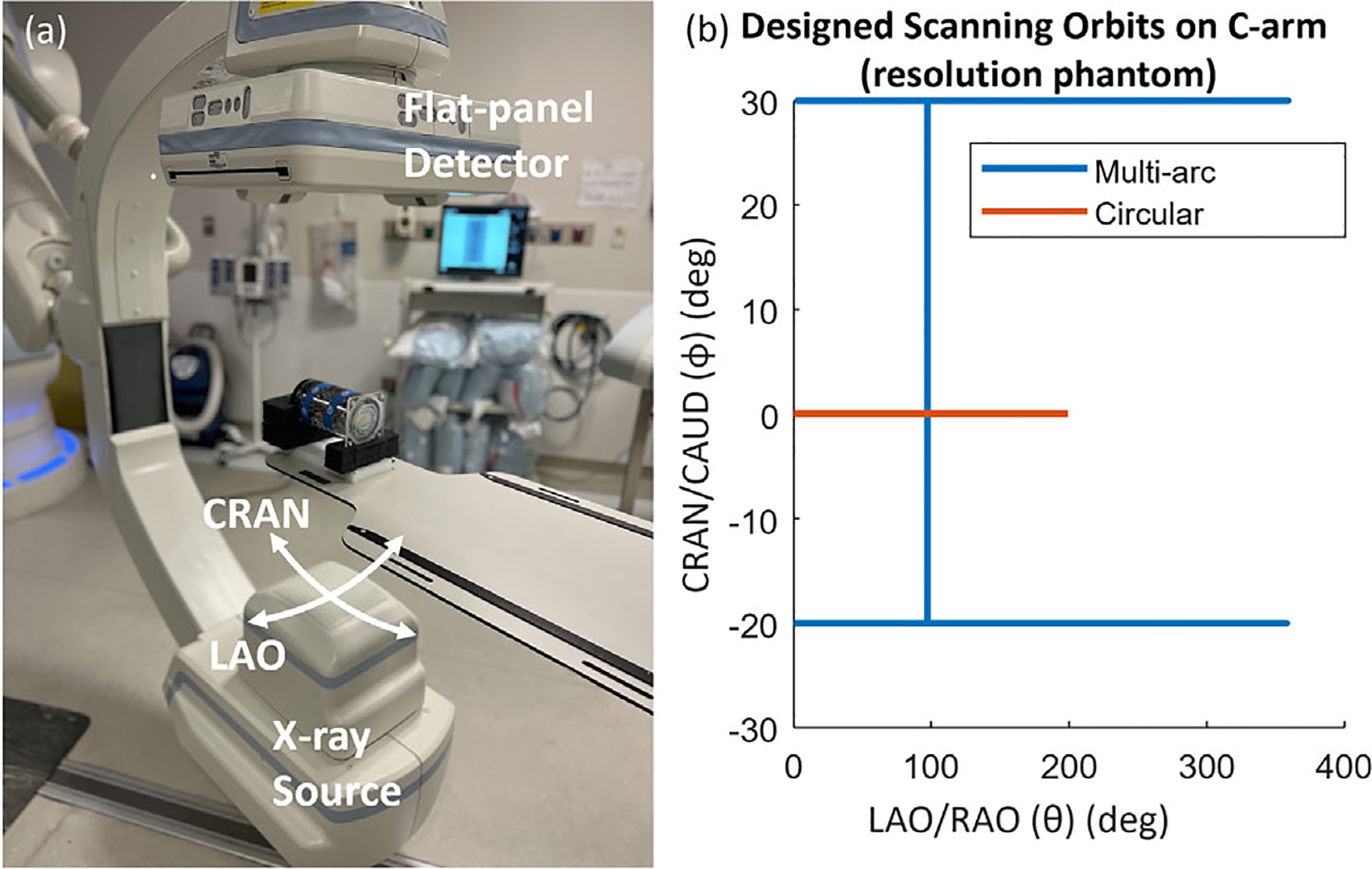
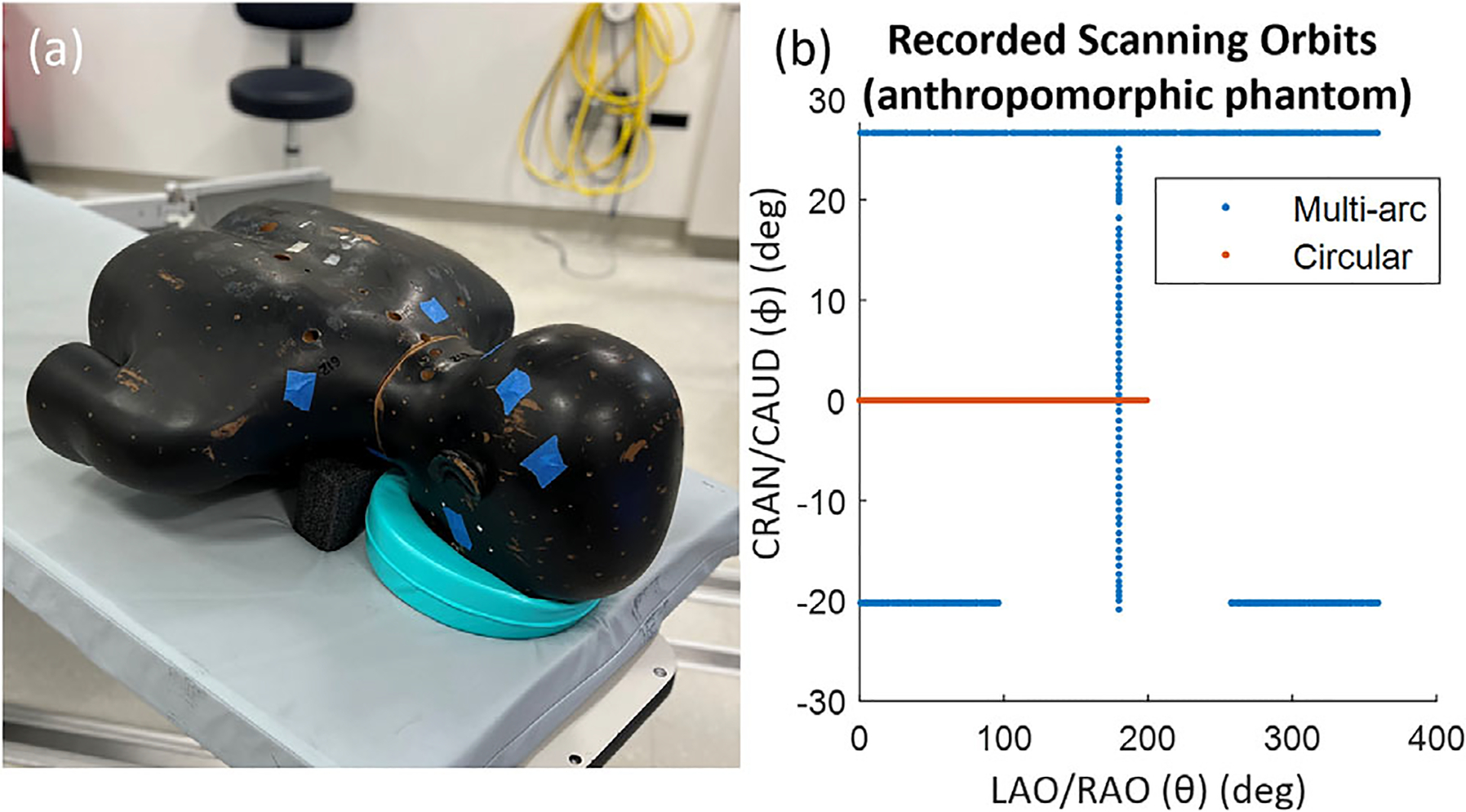
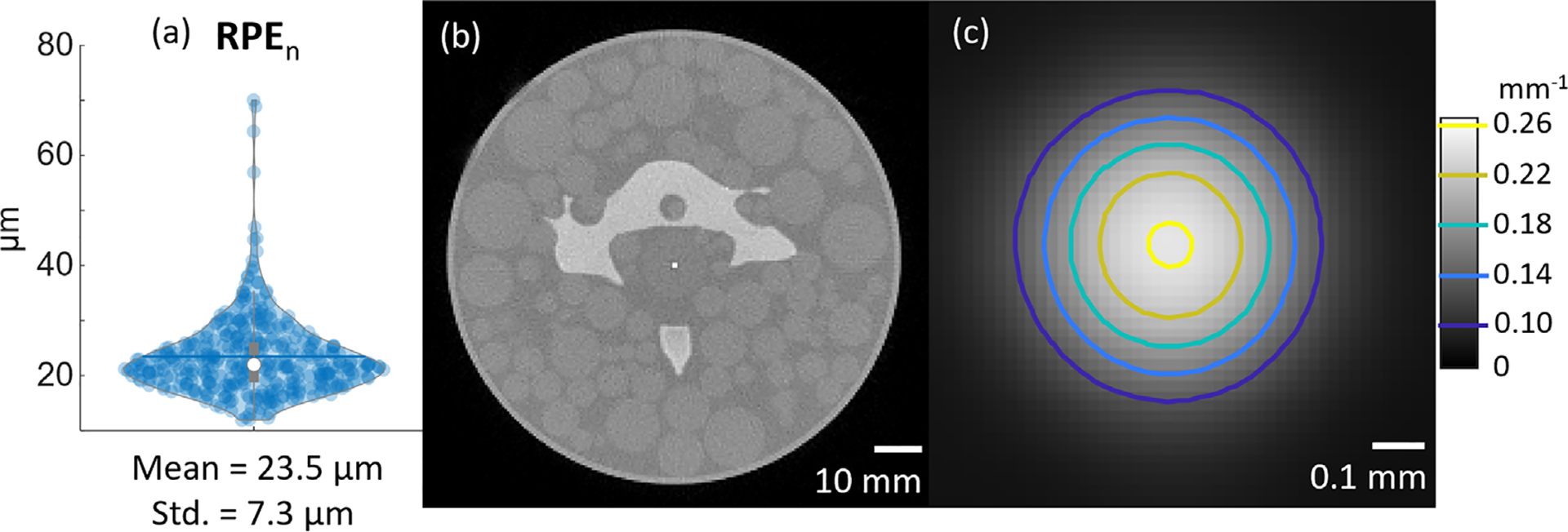
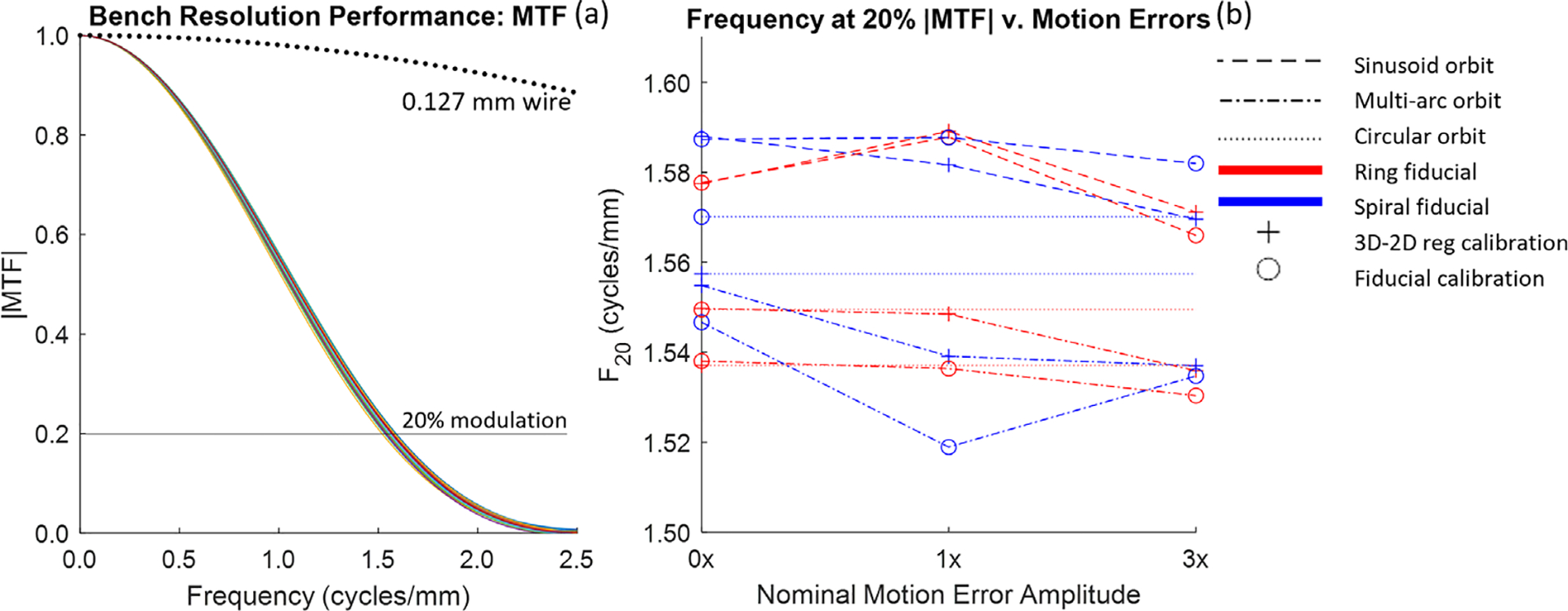
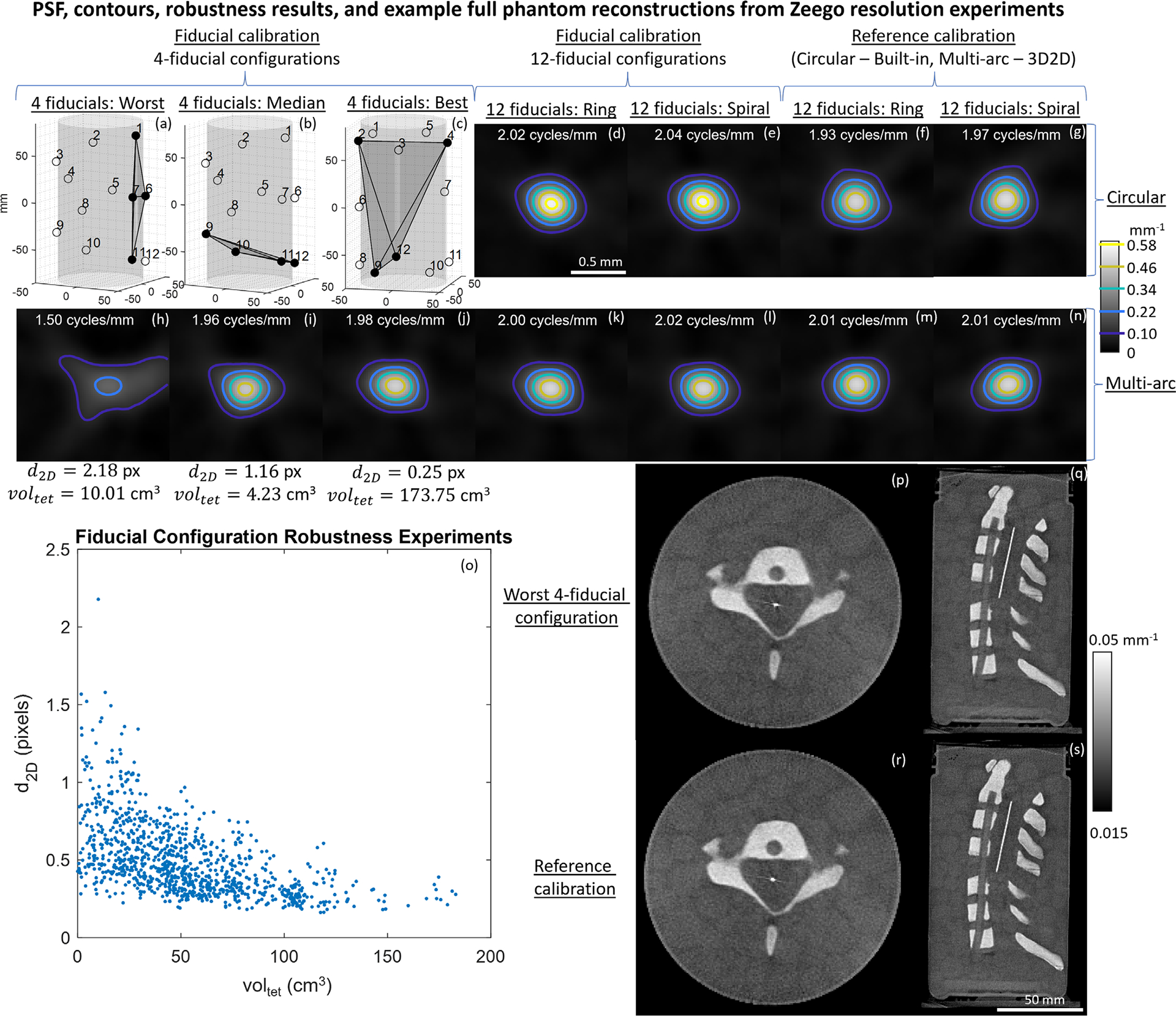
Methods: The algorithm uses an automatic initialization process to eliminate human intervention in fiducial localization and an iterative refinement process to ensure robustness and accuracy. We provide a detailed explanation and implementation of the proposed algorithm. Physical experiments on a lab test bench and a clinical robotic C-arm scanner were conducted to evaluate spatial resolution performance and robustness under realistic constraints.
Results: Qualitative and quantitative results from the physical experiments demonstrate high accuracy, efficiency, and robustness of the proposed method. The spatial resolution performance matched that of our existing benchmark method, which used a 3D-2D registration-based geometric calibration algorithm.
Conclusions: We have demonstrated an automatic online geometric calibration method that delivers high spatial resolution and robustness performance. This methodology enables arbitrary scan trajectories and should facilitate translation of such acquisition methods in a clinical setting.
Keywords: CBCT; C‐arm; fiducial configuration; geometric calibration; image quality; interventional imaging; quality control; task‐driven imaging.
© 2024 American Association of Physicists in Medicine.
Conflict of interest statement
CONFLICT OF INTEREST STATEMENT
The author declares no conflicts of interest.
Figures
Similar articles
-
Self-calibration of cone-beam CT geometry using 3D-2D image registration.Phys Med Biol. 2016 Apr 7;61(7):2613-32. doi: 10.1088/0031-9155/61/7/2613. Epub 2016 Mar 10. Phys Med Biol. 2016. PMID: 26961687 Free PMC article.
-
A line fiducial method for geometric calibration of cone-beam CT systems with diverse scan trajectories.Phys Med Biol. 2018 Jan 16;63(2):025030. doi: 10.1088/1361-6560/aa9910. Phys Med Biol. 2018. PMID: 29116058 Free PMC article.
-
A nonconvex model-based combined geometric calibration scheme for micro cone-beam CT with irregular trajectories.Med Phys. 2023 May;50(5):2759-2774. doi: 10.1002/mp.16257. Epub 2023 Feb 11. Med Phys. 2023. PMID: 36718546
-
AAPM Task Group Report 238: 3D C-arms with volumetric imaging capability.Med Phys. 2023 Aug;50(8):e904-e945. doi: 10.1002/mp.16245. Epub 2023 Feb 20. Med Phys. 2023. PMID: 36710257 Free PMC article. Review.
-
Minimizing magnetic resonance image geometric distortion at 7 Tesla for frameless presurgical planning using skin-adhered fiducials.Med Phys. 2023 Feb;50(2):694-701. doi: 10.1002/mp.16035. Epub 2022 Nov 12. Med Phys. 2023. PMID: 36301228 Review.
Cited by
-
RoboCT: The State and Current Challenges of Industrial Twin Robotic CT Systems.Sensors (Basel). 2025 May 13;25(10):3076. doi: 10.3390/s25103076. Sensors (Basel). 2025. PMID: 40431869 Free PMC article. Review.
-
Universal non-circular cone beam CT orbits for metal artifact reduction imaging during image-guided procedures.Sci Rep. 2024 Nov 1;14(1):26274. doi: 10.1038/s41598-024-77964-9. Sci Rep. 2024. PMID: 39487233 Free PMC article.
-
Investigating 4D respiratory cone-beam CT imaging for thoracic interventions on robotic C-arm systems: a deformable phantom study.Phys Eng Sci Med. 2024 Dec;47(4):1751-1762. doi: 10.1007/s13246-024-01491-0. Epub 2024 Oct 24. Phys Eng Sci Med. 2024. PMID: 39446304 Free PMC article.
References
-
- Leschka SC, Babic D, El Shikh S, Wossmann C, Schumacher M, Taschner CA. C-arm cone beam computed tomography needle path overlay for image-guided procedures of the spine and pelvis. Neuroradiology. 2012;54:215–223. - PubMed
-
- Orth RC, Wallace MJ, Kuo MD, Technology Assessment Committee of the Society of Interventional Radiology. C-arm cone-beam CT: general principles and technical considerations for use in interventional radiology. J Vasc Interv Radiol.2008;19(6):814–820. - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
