

Integrated mechanical computing for autonomous soft machines
- PMID: 38575563
- PMCID: PMC10995184
- DOI: 10.1038/s41467-024-47201-y
Integrated mechanical computing for autonomous soft machines
Abstract
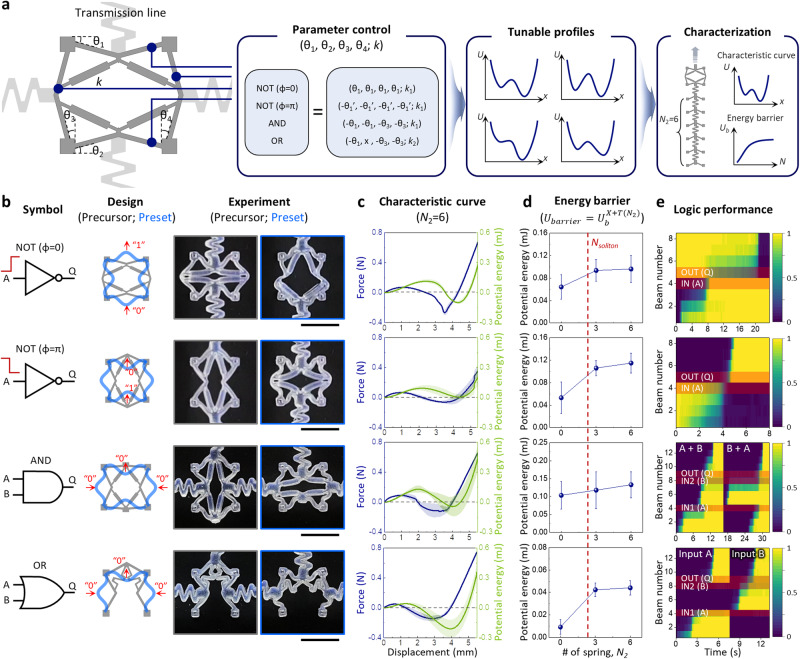
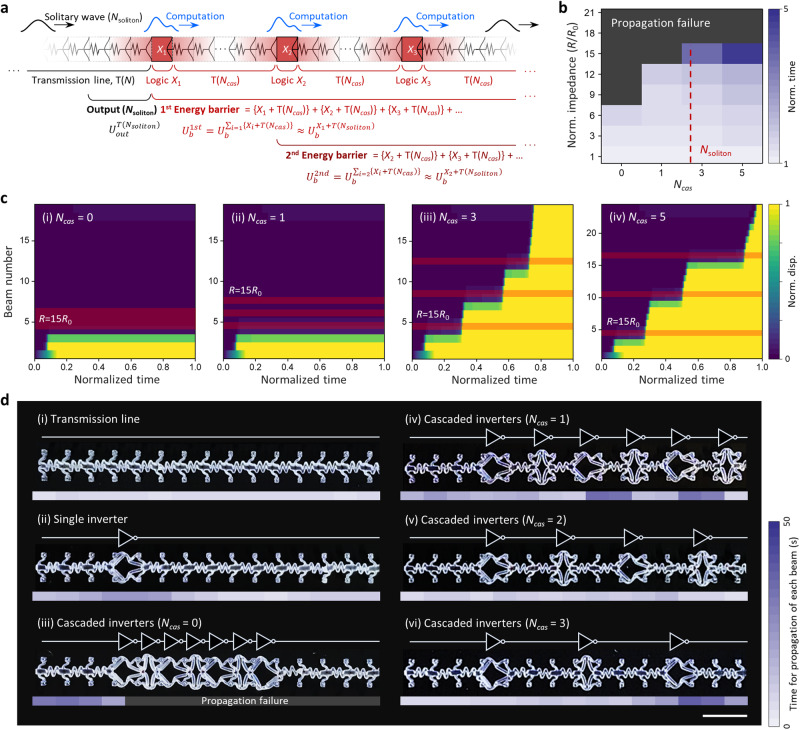
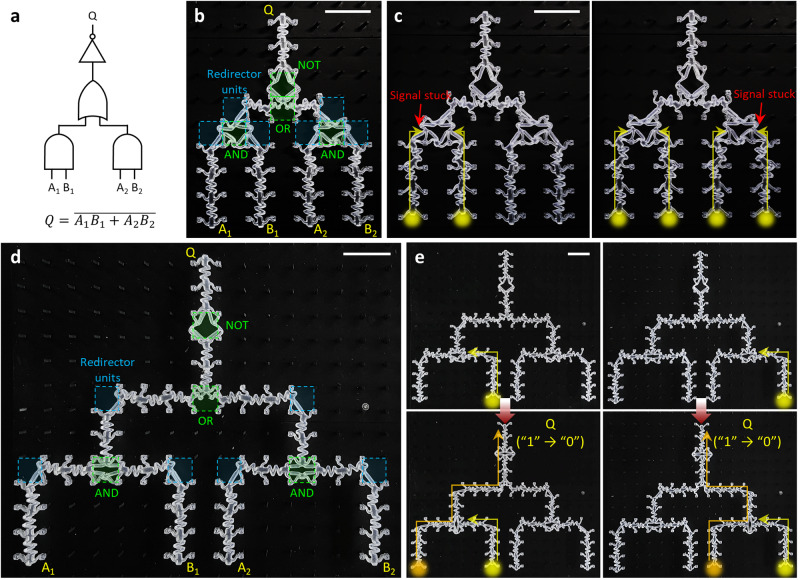
Mechanical computing offers a new modality to formulate computational autonomy in intelligent matter or machines without any external powering or active elements. Transition (or solitary) waves, induced by nonreciprocity in mechanical metamaterials comprising a chain of bistable elements, have proven to be a key ingredient for dissipation-free transmission and computation of mechanical information. However, advanced processing of mechanical information in existing designs is hindered by its dissipation when interacting with networked logic gates. Here, we present a metamaterial design strategy that allows non-dispersive mechanical solitary waves to compute multi-level cascaded logic functions, termed 'integrated mechanical computing', by propagating through a network of structurally heterogeneous computing units. From a perspective of characteristic potential energy, we establish an analytical framework that helps in understanding the solitary wave-based mechanical computation, and governs the mechanical design of key determinants for realizing cascaded logic computation, such as soliton profile and logic elements. The developed integrated mechanical computing systems are shown to receive, transmit and compute mechanical information to actuate intelligent soft machine prototypes in a seamless and integrated manner. These findings would pave the way for future intelligent robots and machines that perform computational operations between various non-electrical environmental inputs.
© 2024. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures



References
-
- Burdon-Sanderson J. Note on the electrical phenomena which accompany irritation of the leaf of Dionaea muscipula. J. Proc. R. Soc. Lond. 1873;21:495–496. doi: 10.1098/rspl.1872.0092. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
