

Data-driven Shape Sensing of Continuum Dexterous Manipulators Using Embedded Capacitive Sensor
- PMID: 38577480
- PMCID: PMC10994196
- DOI: 10.1109/sensors56945.2023.10324929
Data-driven Shape Sensing of Continuum Dexterous Manipulators Using Embedded Capacitive Sensor
Abstract
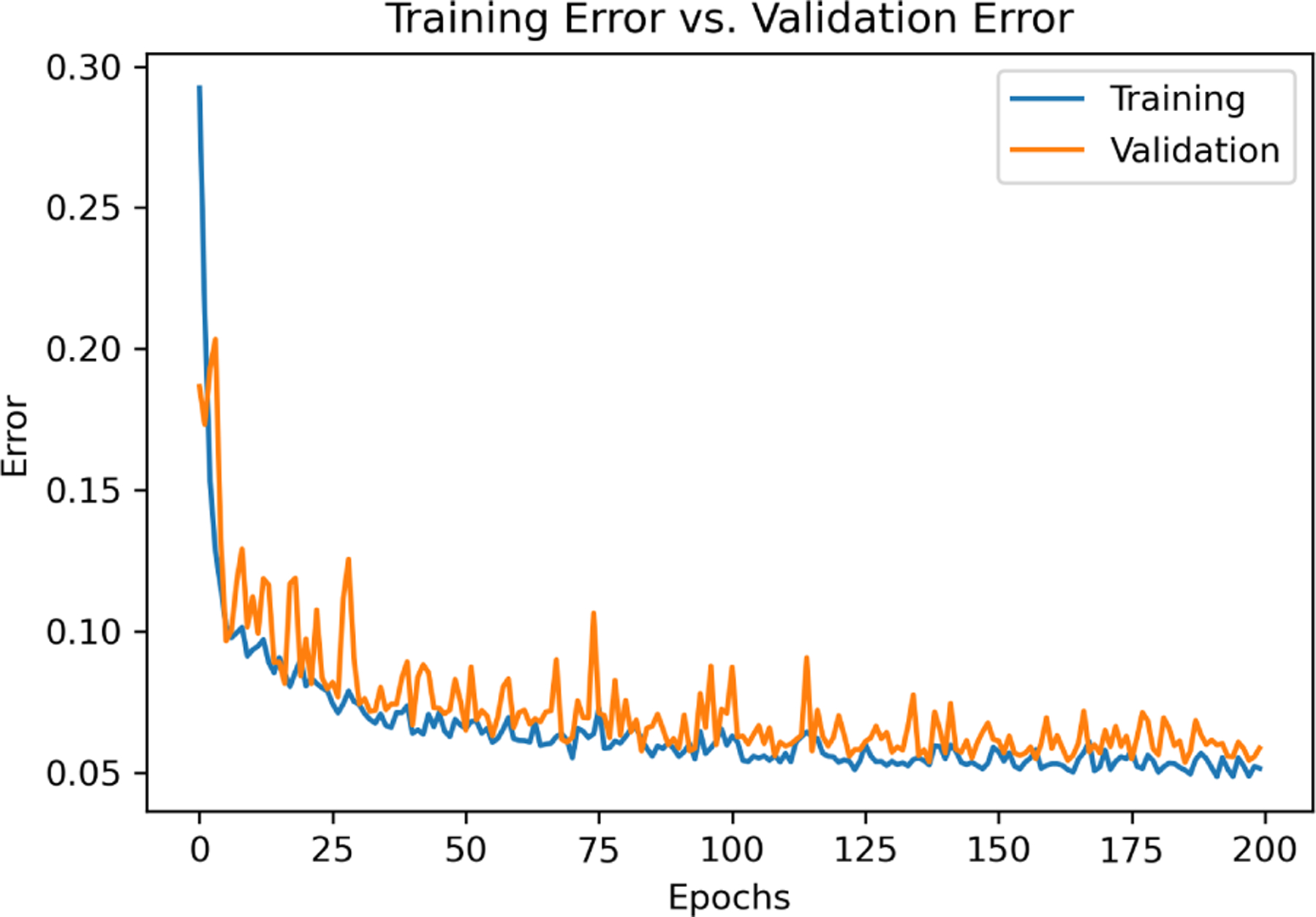
We propose a novel inexpensive embedded capacitive sensor (ECS) for sensing the shape of Continuum Dexterous Manipulators (CDMs). Our approach addresses some limitations associated with the prevalent Fiber Bragg Grating (FBG) sensors, such as temperature sensitivity and high production costs. ECSs are calibrated using a vision-based system. The calibration of the ECS is performed by a recurrent neural network that uses the kinematic data collected from the vision-based system along with the uncalibrated data from ECSs. We evaluated the performance on a 3D printed prototype of a cable-driven CDM with multiple markers along its length. Using data from three ECSs along the length of the CDM, we computed the angle and position of its tip with respect to its base and compared the results to the measurements of the visual-based system. We found a 6.6% tip position error normalized to the length of the CDM. The work shows the early feasibility of using ECSs for shape sensing and feedback control of CDMs and discusses potential future improvements.
Keywords: capacitive sensing; continuum dexterous manipulators; shape estimation.
Figures


Similar articles
-
Design and Fabrication of a Fiber Bragg Grating Shape Sensor for Shape Reconstruction of a Continuum Manipulator.IEEE Sens J. 2023 Jun 15;23(12):12915-12929. doi: 10.1109/jsen.2023.3274146. Epub 2023 May 15. IEEE Sens J. 2023. PMID: 38558829 Free PMC article.
-
High-Resolution Optical Fiber Shape Sensing of Continuum Robots: A Comparative Study.IEEE Int Conf Robot Autom. 2020 May-Aug;2020:10.1109/icra40945.2020.9197454. doi: 10.1109/icra40945.2020.9197454. Epub 2020 Sep 15. IEEE Int Conf Robot Autom. 2020. PMID: 34422444 Free PMC article.
-
Shape Tracking of a Dexterous Continuum Manipulator Utilizing Two Large Deflection Shape Sensors.IEEE Sens J. 2015 Oct;15(10):5494-5503. doi: 10.1109/JSEN.2015.2442266. Epub 2015 Jun 5. IEEE Sens J. 2015. PMID: 27761103 Free PMC article.
-
Shape Reconstruction Processes for Interventional Application Devices: State of the Art, Progress, and Future Directions.Front Robot AI. 2021 Nov 19;8:758411. doi: 10.3389/frobt.2021.758411. eCollection 2021. Front Robot AI. 2021. PMID: 34869615 Free PMC article. Review.
-
Fiber-Bragg-Grating-Based Displacement Sensors: Review of Recent Advances.Materials (Basel). 2022 Aug 12;15(16):5561. doi: 10.3390/ma15165561. Materials (Basel). 2022. PMID: 36013697 Free PMC article. Review.
References
-
- Burgner-Kahrs J, Rucker DC, and Choset H, “Continuum Robots for Medical Applications: A Survey,” IEEE Transactions on Robotics, vol. 31, no. 6, pp. 1261–1280, Dec. 2015. [Online]. Available: https://ieeexplore.ieee.org/document/7314984/
-
- Sefati S, Hegeman R, Iordachita I, Taylor RH, and Armand M, “A Dexterous Robotic System for Autonomous Debridement of Osteolytic Bone Lesions in Confined Spaces: Human Cadaver Studies,” IEEE Transactions on Robotics, vol. 38, no. 2, pp. 1213–1229, Apr. 2022. [Online]. Available: https://ieeexplore.ieee.org/document/9492035/ - PMC - PubMed
-
- Ma JH, Sefati S, Taylor RH, and Armand M, “An Active Steering Hand-Held Robotic System for Minimally Invasive Orthopaedic Surgery Using a Continuum Manipulator,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1622–1629, Apr. 2021. [Online]. Available: https://ieeexplore.ieee.org/document/9354899/ - PMC - PubMed
-
- Gao C, Phalen H, Sefati S, Ma J, Taylor RH, Unberath M, and Armand M, “Fluoroscopic Navigation for a Surgical Robotic System Including a Continuum Manipulator,” IEEE Transactions on Biomedical Engineering, vol. 69, no. 1, pp. 453–464, Jan. 2022, conference Name: IEEE Transactions on Biomedical Engineering. - PMC - PubMed
-
- Shi C, Luo X, Qi P, Li T, Song S, Najdovski Z, Fukuda T, and Ren H, “Shape Sensing Techniques for Continuum Robots in Minimally Invasive Surgery: A Survey,” IEEE Transactions on Biomedical Engineering, vol. 64, no. 8, pp. 1665–1678, Aug. 2017. [Online]. Available: http://ieeexplore.ieee.org/document/7723875/ - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous