

Perturbation Variability Does Not Influence Implicit Sensorimotor Adaptation
- PMID: 38598603
- PMCID: PMC11034674
- DOI: 10.1371/journal.pcbi.1011951
Perturbation Variability Does Not Influence Implicit Sensorimotor Adaptation
Abstract
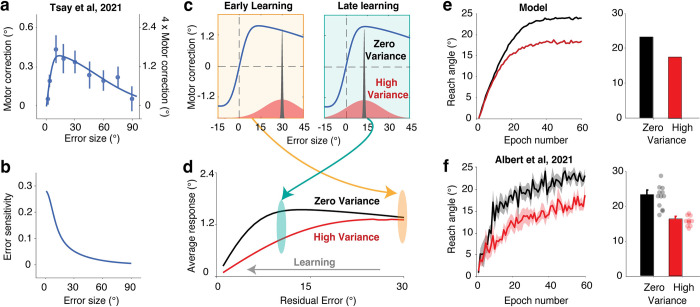
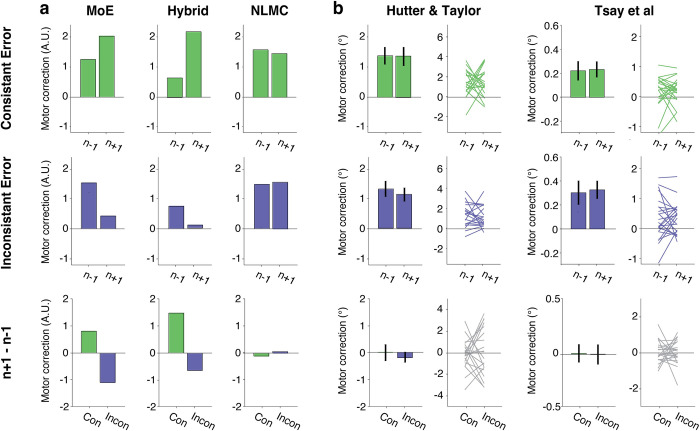
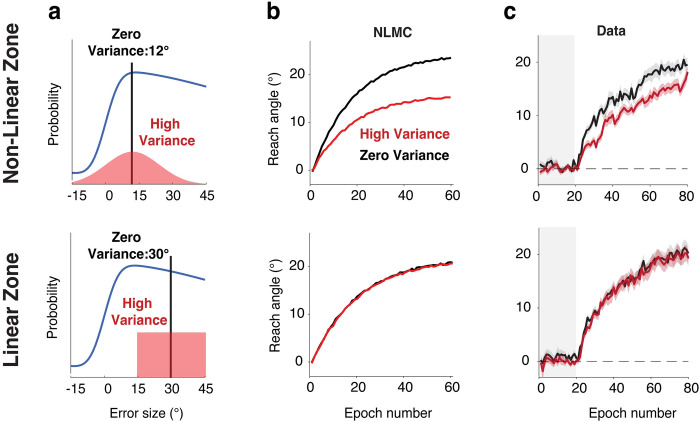
Implicit adaptation has been regarded as a rigid process that automatically operates in response to movement errors to keep the sensorimotor system precisely calibrated. This hypothesis has been challenged by recent evidence suggesting flexibility in this learning process. One compelling line of evidence comes from work suggesting that this form of learning is context-dependent, with the rate of learning modulated by error history. Specifically, learning was attenuated in the presence of perturbations exhibiting high variance compared to when the perturbation is fixed. However, these findings are confounded by the fact that the adaptation system corrects for errors of different magnitudes in a non-linear manner, with the adaptive response increasing in a proportional manner to small errors and saturating to large errors. Through simulations, we show that this non-linear motor correction function is sufficient to explain the effect of perturbation variance without referring to an experience-dependent change in error sensitivity. Moreover, by controlling the distribution of errors experienced during training, we provide empirical evidence showing that there is no measurable effect of perturbation variance on implicit adaptation. As such, we argue that the evidence to date remains consistent with the rigidity assumption.
Copyright: © 2024 Wang et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Conflict of interest statement
I have read the journal’s policy and the authors of this manuscript have the following competing interests: RBI is a co-founder with equity in Magnetic Tides, Inc.
Figures
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
