

Forming cognitive maps for abstract spaces: the roles of the human hippocampus and orbitofrontal cortex
- PMID: 38693344
- PMCID: PMC11063219
- DOI: 10.1038/s42003-024-06214-5
Forming cognitive maps for abstract spaces: the roles of the human hippocampus and orbitofrontal cortex
Abstract
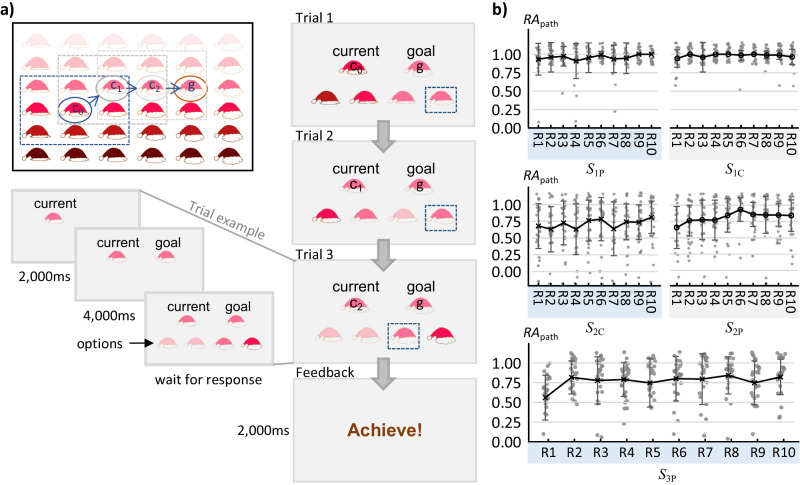
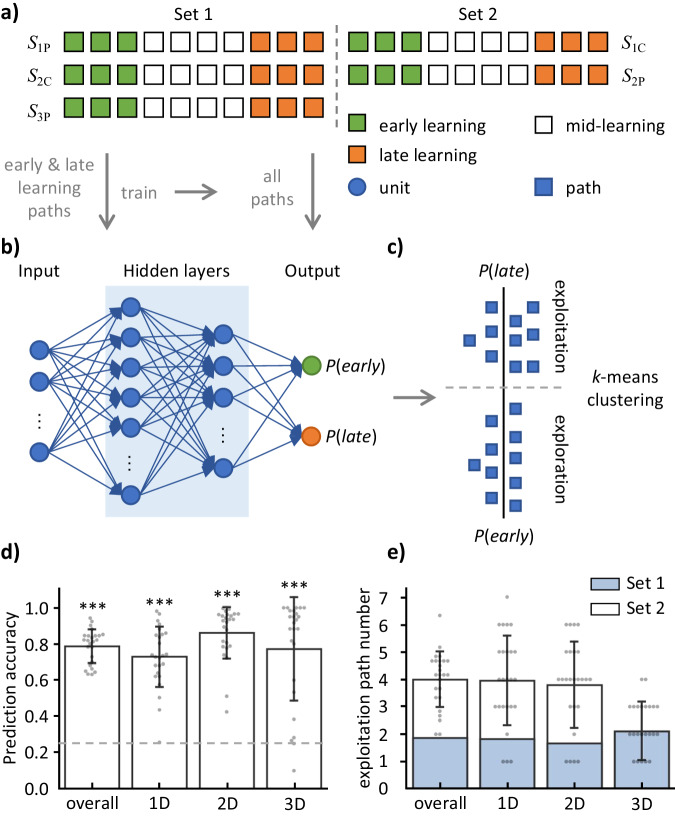
How does the human brain construct cognitive maps for decision-making and inference? Here, we conduct an fMRI study on a navigation task in multidimensional abstract spaces. Using a deep neural network model, we assess learning levels and categorized paths into exploration and exploitation stages. Univariate analyses show higher activation in the bilateral hippocampus and lateral prefrontal cortex during exploration, positively associated with learning level and response accuracy. Conversely, the bilateral orbitofrontal cortex (OFC) and retrosplenial cortex show higher activation during exploitation, negatively associated with learning level and response accuracy. Representational similarity analysis show that the hippocampus, entorhinal cortex, and OFC more accurately represent destinations in exploitation than exploration stages. These findings highlight the collaboration between the medial temporal lobe and prefrontal cortex in learning abstract space structures. The hippocampus may be involved in spatial memory formation and representation, while the OFC integrates sensory information for decision-making in multidimensional abstract spaces.
© 2024. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures


References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
