

Developing a Novel Prosthetic Hand with Wireless Wearable Sensor Technology Based on User Perspectives: A Pilot Study
- PMID: 38732871
- PMCID: PMC11086240
- DOI: 10.3390/s24092765
Developing a Novel Prosthetic Hand with Wireless Wearable Sensor Technology Based on User Perspectives: A Pilot Study
Abstract
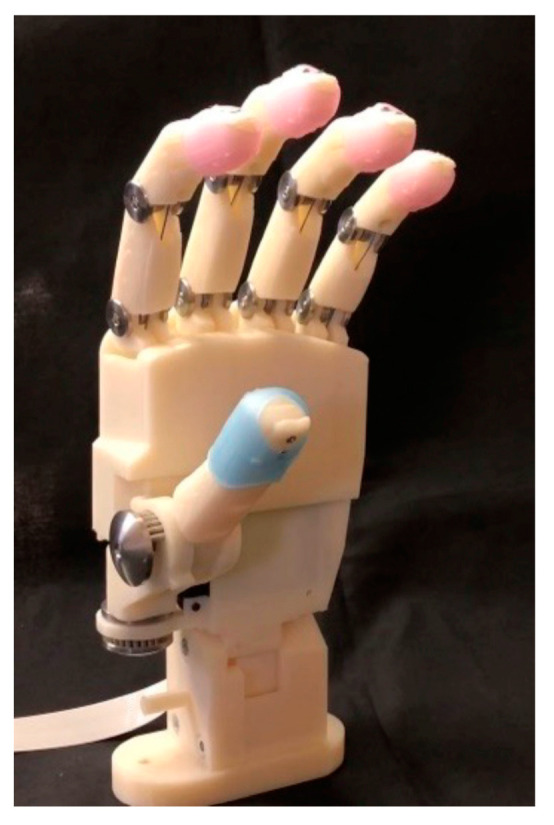
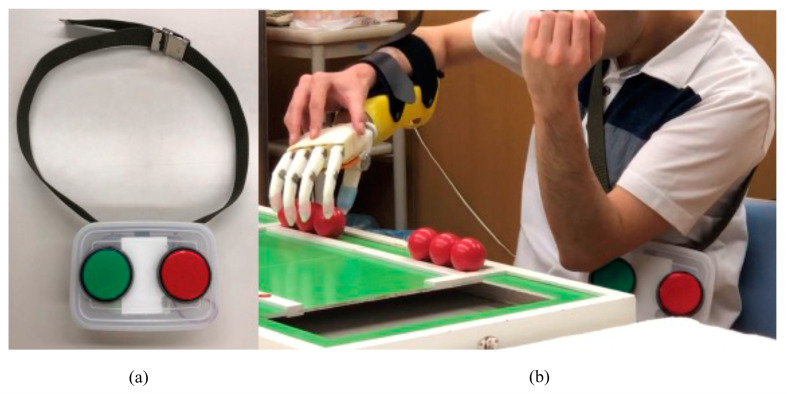
Myoelectric hands are beneficial tools in the daily activities of people with upper-limb deficiencies. Because traditional myoelectric hands rely on detecting muscle activity in residual limbs, they are not suitable for individuals with short stumps or paralyzed limbs. Therefore, we developed a novel electric prosthetic hand that functions without myoelectricity, utilizing wearable wireless sensor technology for control. As a preliminary evaluation, our prototype hand with wireless button sensors was compared with a conventional myoelectric hand (Ottobock). Ten healthy therapists were enrolled in this study. The hands were fixed to their forearms, myoelectric hand muscle activity sensors were attached to the wrist extensor and flexor muscles, and wireless button sensors for the prostheses were attached to each user's trunk. Clinical evaluations were performed using the Simple Test for Evaluating Hand Function and the Action Research Arm Test. The fatigue degree was evaluated using the modified Borg scale before and after the tests. While no statistically significant differences were observed between the two hands across the tests, the change in the Borg scale was notably smaller for our prosthetic hand (p = 0.045). Compared with the Ottobock hand, the proposed hand prosthesis has potential for widespread applications in people with upper-limb deficiencies.
Keywords: electric prosthetic hand; prosthetic hand user perspective; three-dimensional printer; upper-limb deficiency; wireless wearable sensors.
Conflict of interest statement
Hiroyuki Torishima is the founder and current CEO of Saitama Prosthetics and Orthotics Manufacturing Service Co., Ltd. However, this research was conducted before Saitama Prosthetics and Orthotics Manufacturing Service Co., Ltd. was established. Additionally, the remaining authors declare that this research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures

Similar articles
-
First-in-man demonstration of a fully implanted myoelectric sensors system to control an advanced electromechanical prosthetic hand.J Neurosci Methods. 2015 Apr 15;244:85-93. doi: 10.1016/j.jneumeth.2014.07.016. Epub 2014 Aug 4. J Neurosci Methods. 2015. PMID: 25102286 Free PMC article. Clinical Trial.
-
Rechargeable wireless EMG sensor for prosthetic control.Annu Int Conf IEEE Eng Med Biol Soc. 2010;2010:5074-6. doi: 10.1109/IEMBS.2010.5626202. Annu Int Conf IEEE Eng Med Biol Soc. 2010. PMID: 21095801
-
Learning from demonstration: Teaching a myoelectric prosthesis with an intact limb via reinforcement learning.IEEE Int Conf Rehabil Robot. 2017 Jul;2017:1457-1464. doi: 10.1109/ICORR.2017.8009453. IEEE Int Conf Rehabil Robot. 2017. PMID: 28814025
-
Control of Multifunctional Prosthetic Hands by Processing the Electromyographic Signal.Crit Rev Biomed Eng. 2017;45(1-6):383-410. doi: 10.1615/CritRevBiomedEng.v45.i1-6.150. Crit Rev Biomed Eng. 2017. PMID: 29953384 Review.
-
Passive prosthetic hands and tools: A literature review.Prosthet Orthot Int. 2018 Feb;42(1):66-74. doi: 10.1177/0309364617691622. Epub 2017 Mar 1. Prosthet Orthot Int. 2018. PMID: 28190380 Free PMC article. Review.
Cited by
-
Optimizing the impact of time domain segmentation techniques on upper limb EMG decoding using multimodal features.PLoS One. 2025 May 8;20(5):e0322580. doi: 10.1371/journal.pone.0322580. eCollection 2025. PLoS One. 2025. PMID: 40338888 Free PMC article.
References
-
- Yamamoto M., Chung K.C., Sterbenz J., Shauver M.J., Tanaka H., Nakamura T., Oba J., Chin T., Hirata H. Cross-sectional international multicenter study on quality of life and reasons for abandonment of upper limb prostheses. Plast. Reconstr. Surg. Glob. Open. 2019;7:e2205. doi: 10.1097/GOX.0000000000002205. - DOI - PMC - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
Research Materials
