

A multifaceted suite of metrics for comparative myoelectric prosthesis controller research
- PMID: 38739557
- PMCID: PMC11090368
- DOI: 10.1371/journal.pone.0291279
A multifaceted suite of metrics for comparative myoelectric prosthesis controller research
Abstract
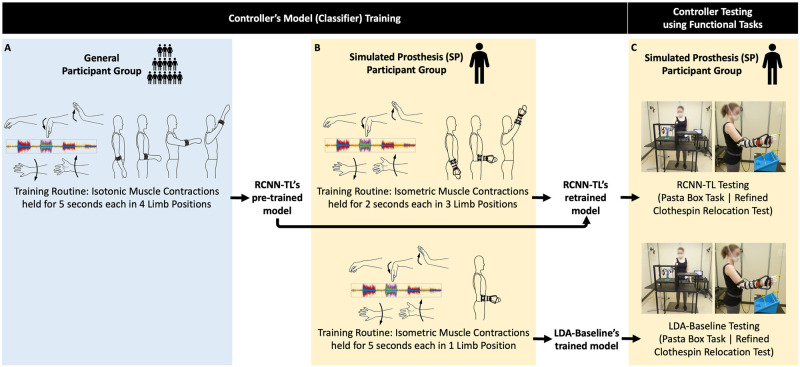
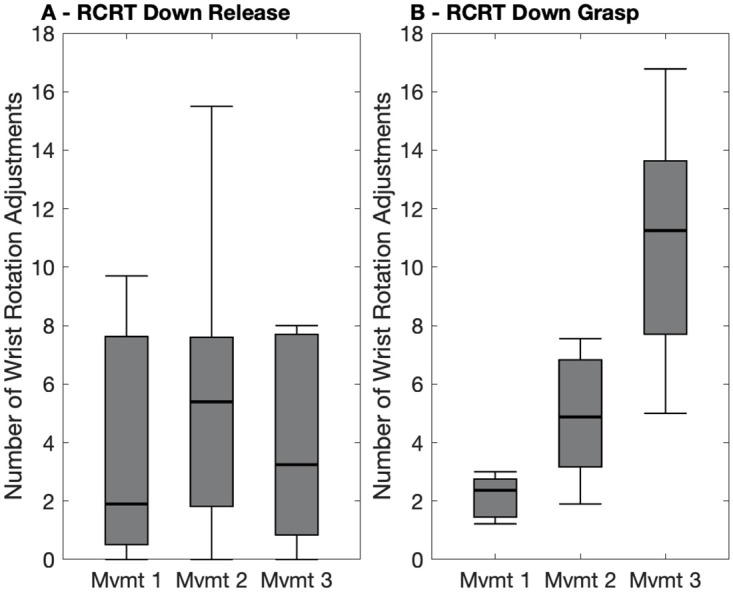
Upper limb robotic (myoelectric) prostheses are technologically advanced, but challenging to use. In response, substantial research is being done to develop person-specific prosthesis controllers that can predict a user's intended movements. Most studies that test and compare new controllers rely on simple assessment measures such as task scores (e.g., number of objects moved across a barrier) or duration-based measures (e.g., overall task completion time). These assessment measures, however, fail to capture valuable details about: the quality of device arm movements; whether these movements match users' intentions; the timing of specific wrist and hand control functions; and users' opinions regarding overall device reliability and controller training requirements. In this work, we present a comprehensive and novel suite of myoelectric prosthesis control evaluation metrics that better facilitates analysis of device movement details-spanning measures of task performance, control characteristics, and user experience. As a case example of their use and research viability, we applied these metrics in real-time control experimentation. Here, eight participants without upper limb impairment compared device control offered by a deep learning-based controller (recurrent convolutional neural network-based classification with transfer learning, or RCNN-TL) to that of a commonly used controller (linear discriminant analysis, or LDA). The participants wore a simulated prosthesis and performed complex functional tasks across multiple limb positions. Analysis resulting from our suite of metrics identified 16 instances of a user-facing problem known as the "limb position effect". We determined that RCNN-TL performed the same as or significantly better than LDA in four such problem instances. We also confirmed that transfer learning can minimize user training burden. Overall, this study contributes a multifaceted new suite of control evaluation metrics, along with a guide to their application, for use in research and testing of myoelectric controllers today, and potentially for use in broader rehabilitation technologies of the future.
Copyright: © 2024 Williams et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures





References
-
- Braza DW, Yacub Martin JN. Upper Limb Amputations. In: Essentials of Physical Medicine and Rehabilitation: Musculoskeletal Disorders, Pain, and Rehabilitation. 4th ed. Elsevier Inc.; 2018. p. 651–657.
-
- Shehata AW, Williams HE, Hebert JS, Pilarski PM. Machine learning for the control of prosthetic arms. IEEE Signal Processing Magazine. 2021;38(4):46–53. doi: 10.1109/MSP.2021.3075931 - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
Research Materials
