

ASG-YOLOv5: Improved YOLOv5 unmanned aerial vehicle remote sensing aerial images scenario for small object detection based on attention and spatial gating
- PMID: 38829850
- PMCID: PMC11146694
- DOI: 10.1371/journal.pone.0298698
ASG-YOLOv5: Improved YOLOv5 unmanned aerial vehicle remote sensing aerial images scenario for small object detection based on attention and spatial gating
Abstract
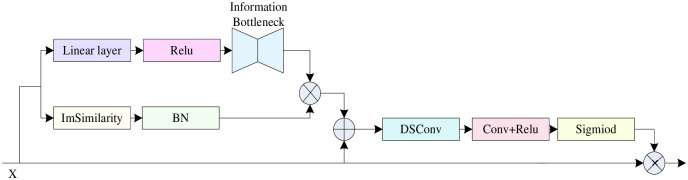
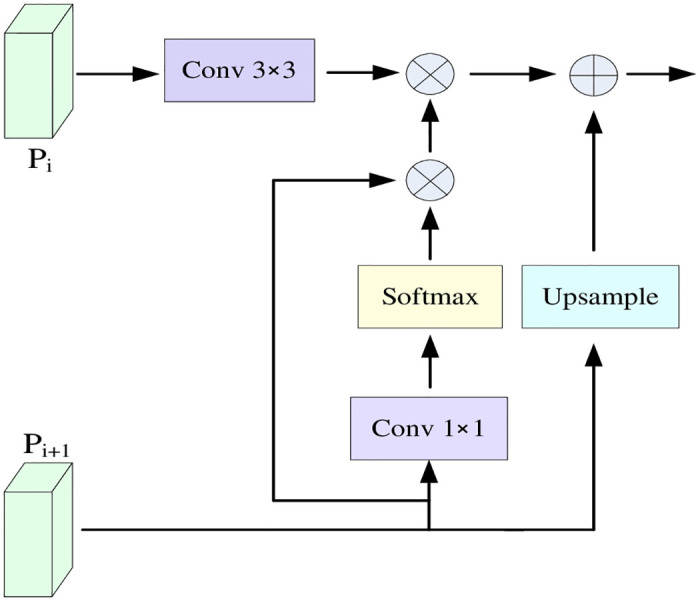
With the accelerated development of the technological power of society, aerial images of drones gradually penetrated various industries. Due to the variable speed of drones, the captured images are shadowed, blurred, and obscured. Second, drones fly at varying altitudes, leading to changing target scales and making it difficult to detect and identify small targets. In order to solve the above problems, an improved ASG-YOLOv5 model is proposed in this paper. Firstly, this research proposes a dynamic contextual attention module, which uses feature scores to dynamically assign feature weights and output feature information through channel dimensions to improve the model's attention to small target feature information and increase the network's ability to extract contextual information; secondly, this research designs a spatial gating filtering multi-directional weighted fusion module, which uses spatial filtering and weighted bidirectional fusion in the multi-scale fusion stage to improve the characterization of weak targets, reduce the interference of redundant information, and better adapt to the detection of weak targets in images under unmanned aerial vehicle remote sensing aerial photography; meanwhile, using Normalized Wasserstein Distance and CIoU regression loss function, the similarity metric value of the regression frame is obtained by modeling the Gaussian distribution of the regression frame, which increases the smoothing of the positional difference of the small targets and solves the problem that the positional deviation of the small targets is very sensitive, so that the model's detection accuracy of the small targets is effectively improved. This paper trains and tests the model on the VisDrone2021 and AI-TOD datasets. This study used the NWPU-RESISC dataset for visual detection validation. The experimental results show that ASG-YOLOv5 has a better detection effect in unmanned aerial vehicle remote sensing aerial images, and the frames per second (FPS) reaches 86, which meets the requirement of real-time small target detection, and it can be better adapted to the detection of the weak and small targets in the aerial image dataset, and ASG-YOLOv5 outperforms many existing target detection methods, and its detection accuracy reaches 21.1% mAP value. The mAP values are improved by 2.9% and 1.4%, respectively, compared with the YOLOv5 model. The project is available at https://github.com/woaini-shw/asg-yolov5.git.
Copyright: © 2024 Shi et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures







Similar articles
-
YOLOv5_mamba: unmanned aerial vehicle object detection based on bidirectional dense feedback network and adaptive gate feature fusion.Sci Rep. 2024 Sep 27;14(1):22396. doi: 10.1038/s41598-024-73241-x. Sci Rep. 2024. PMID: 39333360 Free PMC article.
-
A small target detection algorithm based on improved YOLOv5 in aerial image.PeerJ Comput Sci. 2024 Apr 29;10:e2007. doi: 10.7717/peerj-cs.2007. eCollection 2024. PeerJ Comput Sci. 2024. PMID: 38699205 Free PMC article.
-
Swin-Transformer-Based YOLOv5 for Small-Object Detection in Remote Sensing Images.Sensors (Basel). 2023 Mar 31;23(7):3634. doi: 10.3390/s23073634. Sensors (Basel). 2023. PMID: 37050694 Free PMC article.
-
Research progress of inland river water quality monitoring technology based on unmanned aerial vehicle hyperspectral imaging technology.Environ Res. 2024 Sep 15;257:119254. doi: 10.1016/j.envres.2024.119254. Epub 2024 May 28. Environ Res. 2024. PMID: 38815715 Review.
-
Embodied aerial physical interaction: Combining body and brain for robust interaction with unstructured environments.Sci Robot. 2025 May 21;10(102):eads0200. doi: 10.1126/scirobotics.ads0200. Epub 2025 May 21. Sci Robot. 2025. PMID: 40397719 Review.
Cited by
-
M-ReDet: A mamba-based method for remote sensing ship object detection and fine-grained recognition.PLoS One. 2025 Aug 21;20(8):e0330485. doi: 10.1371/journal.pone.0330485. eCollection 2025. PLoS One. 2025. PMID: 40839647 Free PMC article.
-
An improved YOLOv8s-based UAV target detection algorithm.PLoS One. 2025 Aug 21;20(8):e0327732. doi: 10.1371/journal.pone.0327732. eCollection 2025. PLoS One. 2025. PMID: 40839710 Free PMC article.
References
-
- Haoyang Zhang, Ying Wang, Feras Dayoub, and Niko Sunderhauf. Varifocalnet: An iou-aware dense object detector. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 8514–8523,2021.
-
- Yukang Chen, Peizhen Zhang, Zeming Li, Yanwei Li, Xiangyu Zhang, Gaofeng Meng, et al: Feedback-driven data provider for object detection. arXiv e-prints, pp. arXiv-2004,2020.
-
- Zhu, Xingkui, et al. "TPH-YOLOv5: Improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios." Proceedings of the IEEE/CVF international conference on computer vision. 2021.
-
- Wang, Jinwang, et al. "A normalized Gaussian Wasserstein distance for tiny object detection." arXiv preprint arXiv:2110.13389, 2021.
-
- Zhaohui Zheng, Ping Wang, Dongwei Ren, Wei Liu, Rongguang Ye, Qinghua Hu, et al. Enhancing Geometric Factors in Model Learning and Inference for Object Detection and Instance Segmentation. arXiv preprint arXiv:2005.03572,2020. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Miscellaneous
