

Research on multi-object detection technology for road scenes based on SDG-YOLOv5
- PMID: 38855227
- PMCID: PMC11157580
- DOI: 10.7717/peerj-cs.2021
Research on multi-object detection technology for road scenes based on SDG-YOLOv5
Abstract
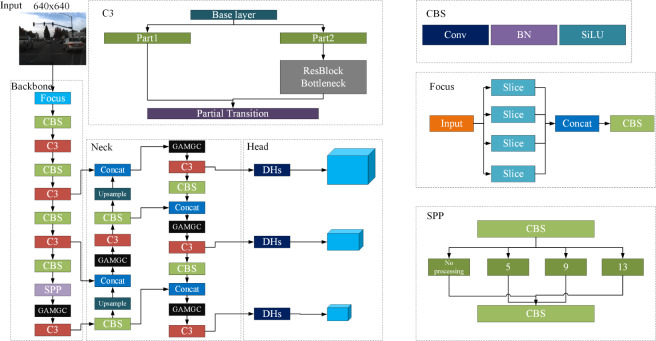
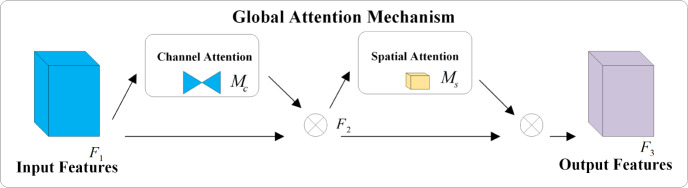
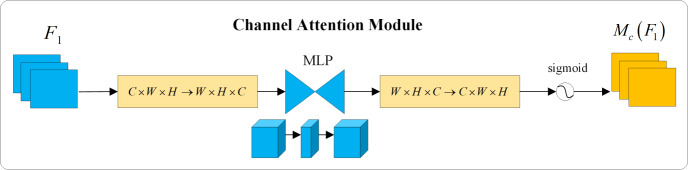
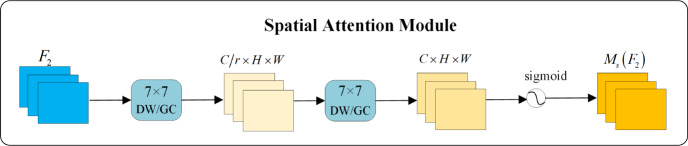
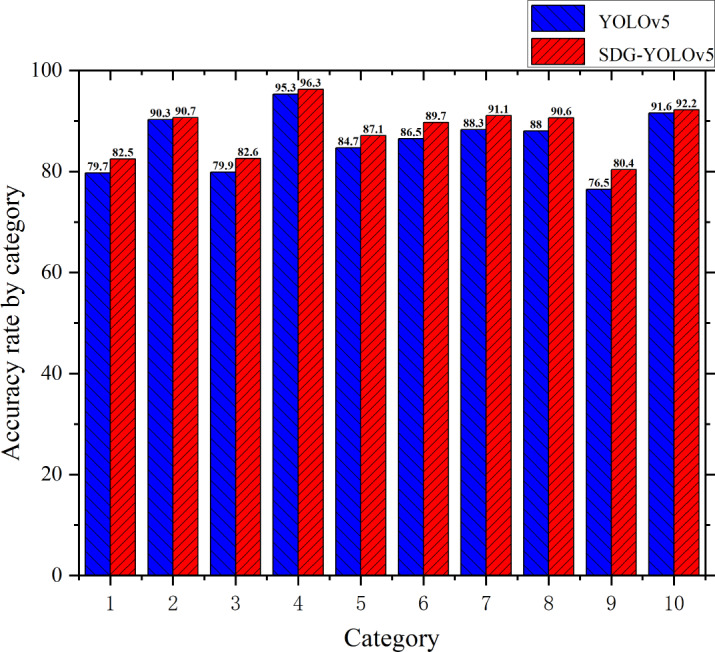
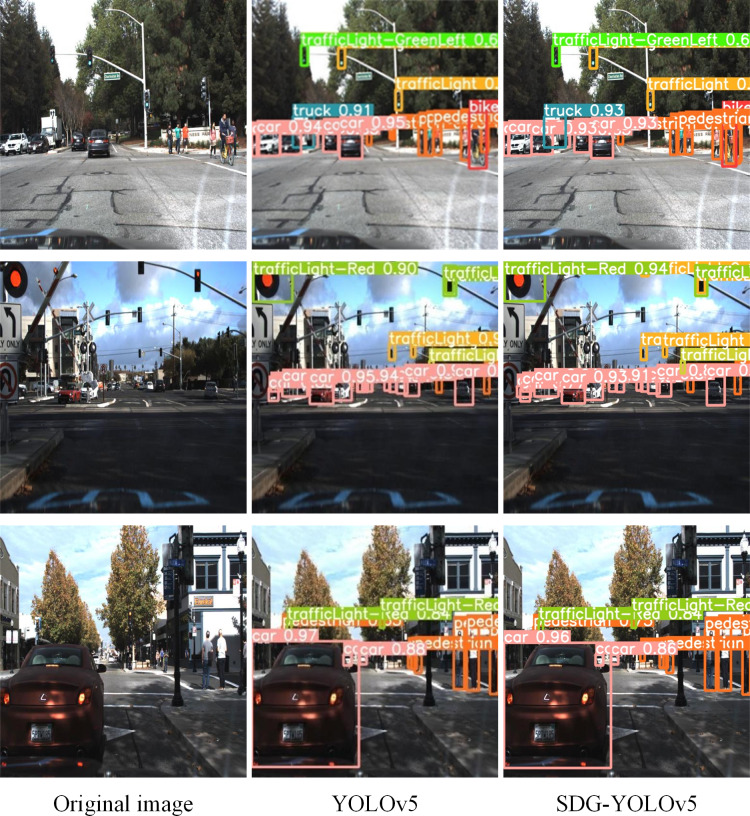
To resolve the challenges of low detection accuracy and inadequate real-time performance in road scene detection, this article introduces the enhanced algorithm SDG-YOLOv5. The algorithm incorporates the SIoU Loss function to accurately predict the angle loss of bounding boxes, ensuring their directionality during regression and improving both regression accuracy and convergence speed. A novel lightweight decoupled heads (DHs) approach is employed to separate the classification and regression tasks, thereby avoiding conflicts between their focus areas. Moreover, the Global Attention Mechanism Group Convolution (GAMGC), a lightweight strategy, is utilized to enhance the network's capability to process additional contextual information, thereby improving the detection of small targets. Extensive experimental analysis on datasets from Udacity Self Driving Car, BDD100K, and KITTI demonstrates that the proposed algorithm achieves improvements in mAP@.5 of 2.2%, 3.4%, and 1.0% over the original YOLOv5, with a detection speed of 30.3 FPS. These results illustrate that the SDG-YOLOv5 algorithm effectively addresses both detection accuracy and real-time performance in road scene detection.
Keywords: Attention mechanism; Decoupled detection head; Intelligent driving; Road scene detection.
©2024 Lv et al.
Conflict of interest statement
Naihong Guo is employed by Yancheng XiongYing Precision Machinery Company Limited.
Figures




Similar articles
-
Enhanced YOLOv5: An Efficient Road Object Detection Method.Sensors (Basel). 2023 Oct 10;23(20):8355. doi: 10.3390/s23208355. Sensors (Basel). 2023. PMID: 37896450 Free PMC article.
-
Pedestrian detection algorithm integrating large kernel attention and YOLOV5 lightweight model.PLoS One. 2023 Nov 29;18(11):e0294865. doi: 10.1371/journal.pone.0294865. eCollection 2023. PLoS One. 2023. PMID: 38019827 Free PMC article.
-
EMG-YOLO: road crack detection algorithm for edge computing devices.Front Neurorobot. 2024 Jul 2;18:1423738. doi: 10.3389/fnbot.2024.1423738. eCollection 2024. Front Neurorobot. 2024. PMID: 39015151 Free PMC article.
-
HDS-YOLOv5: An improved safety harness hook detection algorithm based on YOLOv5s.Math Biosci Eng. 2023 Jul 25;20(8):15476-15495. doi: 10.3934/mbe.2023691. Math Biosci Eng. 2023. PMID: 37679188
-
Research on a vehicle and pedestrian detection algorithm based on improved attention and feature fusion.Math Biosci Eng. 2024 Apr 26;21(4):5782-5802. doi: 10.3934/mbe.2024255. Math Biosci Eng. 2024. PMID: 38872558
References
-
- Bochkovskiy A, Wang C-Y, Liao H-Y. YOLOv4: optimal speed and accuracy of object detection. ArXiv. 2020. - DOI
-
- Cai Y, Luan T, Gao H, Wang H, Chen L, Li Y, Sotelo M, Li Z. YOLOv4-5D: an effective and efficient object detector for autonomous driving. IEEE Transactions on Instrumentation and Measurement. 2021;70:4503613. doi: 10.1109/TIM.2021.3065438. - DOI
-
- Du Y, Qin B, Zhao C, Zhu Y, Cao J, Ji Y. A novel spatio-temporal synchronization method of roadside asynchronous MMW radar-camera for sensor fusion. IEEE Transactions on Intelligent Transportation Systems. 2022;23:22278–22289. doi: 10.1109/TITS.2021.3119079. - DOI
-
- Ge Z, Liu S, Wang F, Li Z, Sun J. YOLOX: exceeding YOLO series in 2021. ArXiv. 2021. - DOI
-
- Girshick R, Donahue J, Darrell T, Malik J. Rich feature hierarchies for accurate object detection and semantic segmentation. 2014 IEEE conference on computer vision and pattern recognition, Columbus, OH, USA, pp; Piscataway. 2014. pp. 580–587. - DOI
LinkOut - more resources
Full Text Sources
Miscellaneous