

Anthropomorphic motion planning for multi-degree-of-freedom arms
- PMID: 38863490
- PMCID: PMC11165200
- DOI: 10.3389/fbioe.2024.1388609
Anthropomorphic motion planning for multi-degree-of-freedom arms
Abstract
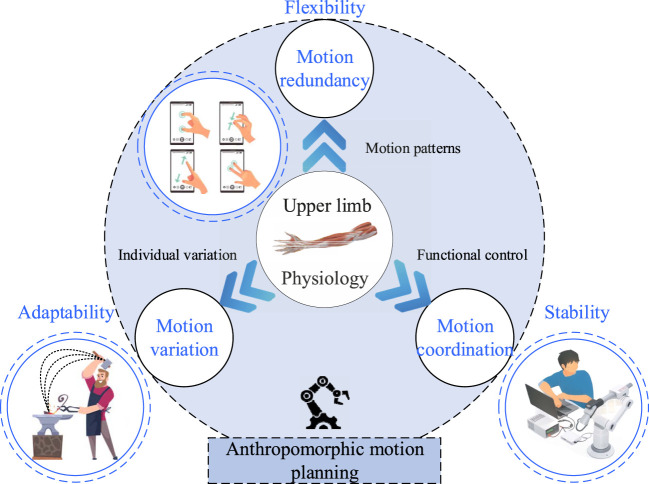
With the development of technology, the humanoid robot is no longer a concept, but a practical partner with the potential to assist people in industry, healthcare and other daily scenarios. The basis for the success of humanoid robots is not only their appearance, but more importantly their anthropomorphic behaviors, which is crucial for the human-robot interaction. Conventionally, robots are designed to follow meticulously calculated and planned trajectories, which typically rely on predefined algorithms and models, resulting in the inadaptability to unknown environments. Especially when faced with the increasing demand for personalized and customized services, predefined motion planning cannot be adapted in time to adapt to personal behavior. To solve this problem, anthropomorphic motion planning has become the focus of recent research with advances in biomechanics, neurophysiology, and exercise physiology which deepened the understanding of the body for generating and controlling movement. However, there is still no consensus on the criteria by which anthropomorphic motion is accurately generated and how to generate anthropomorphic motion. Although there are articles that provide an overview of anthropomorphic motion planning such as sampling-based, optimization-based, mimicry-based, and other methods, these methods differ only in the nature of the planning algorithms and have not yet been systematically discussed in terms of the basis for extracting upper limb motion characteristics. To better address the problem of anthropomorphic motion planning, the key milestones and most recent literature have been collated and summarized, and three crucial topics are proposed to achieve anthropomorphic motion, which are motion redundancy, motion variation, and motion coordination. The three characteristics are interrelated and interdependent, posing the challenge for anthropomorphic motion planning system. To provide some insights for the research on anthropomorphic motion planning, and improve the anthropomorphic motion ability, this article proposes a new taxonomy based on physiology, and a more complete system of anthropomorphic motion planning by providing a detailed overview of the existing methods and their contributions.
Keywords: anthropomorphic; arms; motion coordination; motion planning; motion redundancy; motion variation.
Copyright © 2024 Zheng, Han and Liang.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures
Similar articles
-
A Whole-Body Coordinated Motion Control Method for Highly Redundant Degrees of Freedom Mobile Humanoid Robots.Biomimetics (Basel). 2024 Dec 16;9(12):766. doi: 10.3390/biomimetics9120766. Biomimetics (Basel). 2024. PMID: 39727770 Free PMC article.
-
Cooperative Dynamic Motion Planning for Dual Manipulator Arms Based on RRT*Smart-AD Algorithm.Sensors (Basel). 2023 Sep 8;23(18):7759. doi: 10.3390/s23187759. Sensors (Basel). 2023. PMID: 37765821 Free PMC article.
-
Anthropomorphic Reaching Movement Generating Method for Human-Like Upper Limb Robot.IEEE Trans Cybern. 2022 Dec;52(12):13225-13236. doi: 10.1109/TCYB.2021.3107341. Epub 2022 Nov 18. IEEE Trans Cybern. 2022. PMID: 34662283
-
Towards understanding and synthesis of contact-rich anthropomorphic motions through interactive cyber-physical human.Front Robot AI. 2022 Dec 1;9:1019523. doi: 10.3389/frobt.2022.1019523. eCollection 2022. Front Robot AI. 2022. PMID: 36530502 Free PMC article. Review.
-
Biomimetic Approaches for Human Arm Motion Generation: Literature Review and Future Directions.Sensors (Basel). 2023 Apr 12;23(8):3912. doi: 10.3390/s23083912. Sensors (Basel). 2023. PMID: 37112253 Free PMC article. Review.
References
-
- Albrecht S., Ramirez-Amaro K., Ruiz-Ugalde F., Weikersdorfer D., Leibold M., Ulbrich M., et al. (2011). “Imitating human reaching motions using physically inspired optimization principles,” in 2011 11th IEEE-RAS International Conference on Humanoid Robots (Bled, Slovenia: IEEE; ), 602–607. 10.1109/humanoids.2011.6100856 - DOI
-
- Arimoto S., Sekimoto M. (2006). “Human-like movements of robotic arms with redundant DOFs: virtual spring-damper hypothesis to tackle the Bernstein problem,” in Proceedings of the 2006 IEEE International Conference on Robotics and Automation (Orlando, Florida, USA: IEEE; ), 1860–1866. 10.1109/robot.2006.1641977 - DOI
-
- Arkin R. C., Moshkina L. (2014). “Affect in human-robot interaction,” in The oxford handbook of affective computing. Editor Calvo R. (Oxford: Oxford University Press; ), 483–493.
-
- Artemiadis P. K., Katsiaris P. T., Kyriakopoulos K. J. (2010). A biomimetic approach to inverse kinematics for a redundant robot arm. Aut. Robots 29 (3-4), 293–308. 10.1007/s10514-010-9196-x - DOI
Publication types
LinkOut - more resources
Full Text Sources