

Advanced Design of Soft Robots with Artificial Intelligence
- PMID: 38869734
- PMCID: PMC11176285
- DOI: 10.1007/s40820-024-01423-3
Advanced Design of Soft Robots with Artificial Intelligence
Abstract
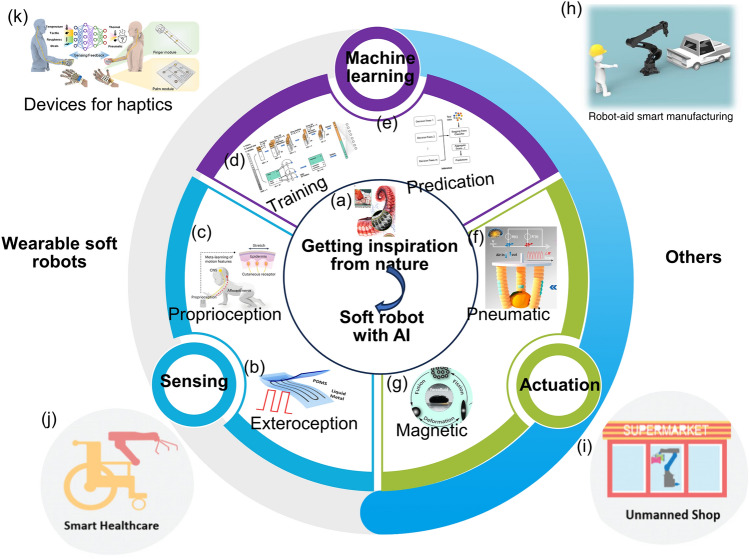
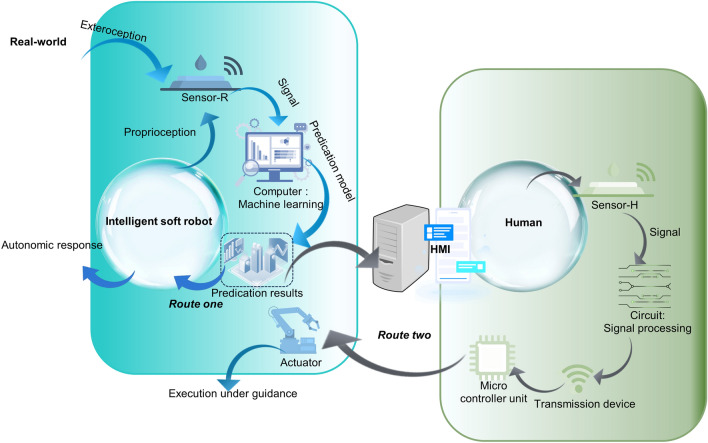
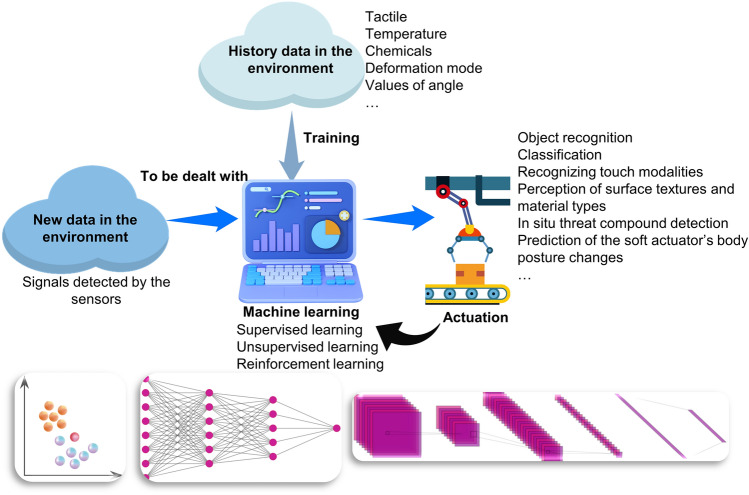
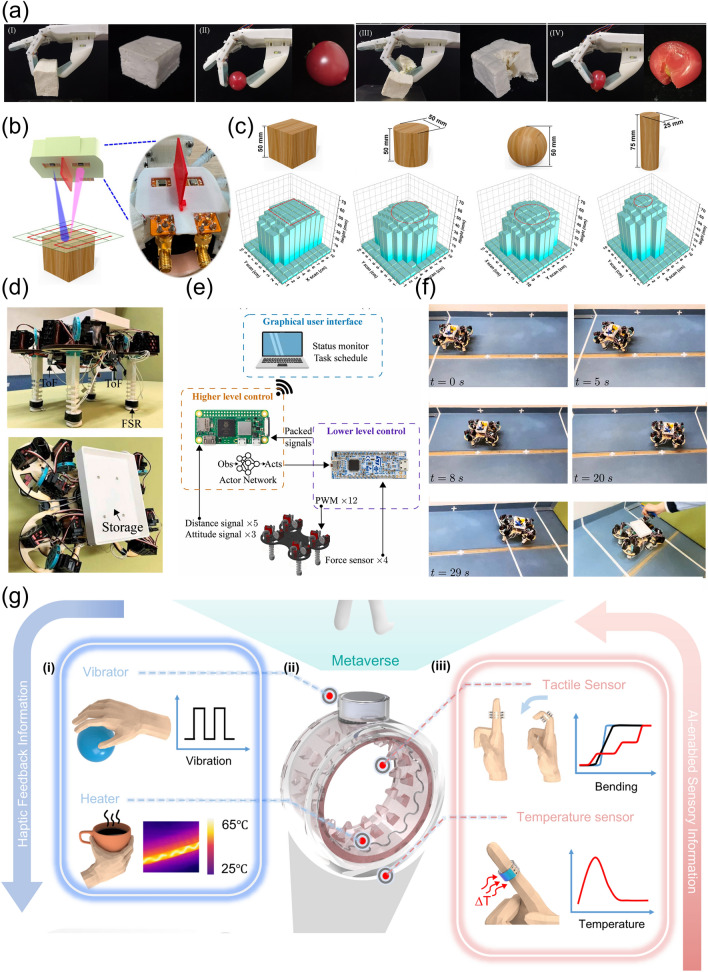
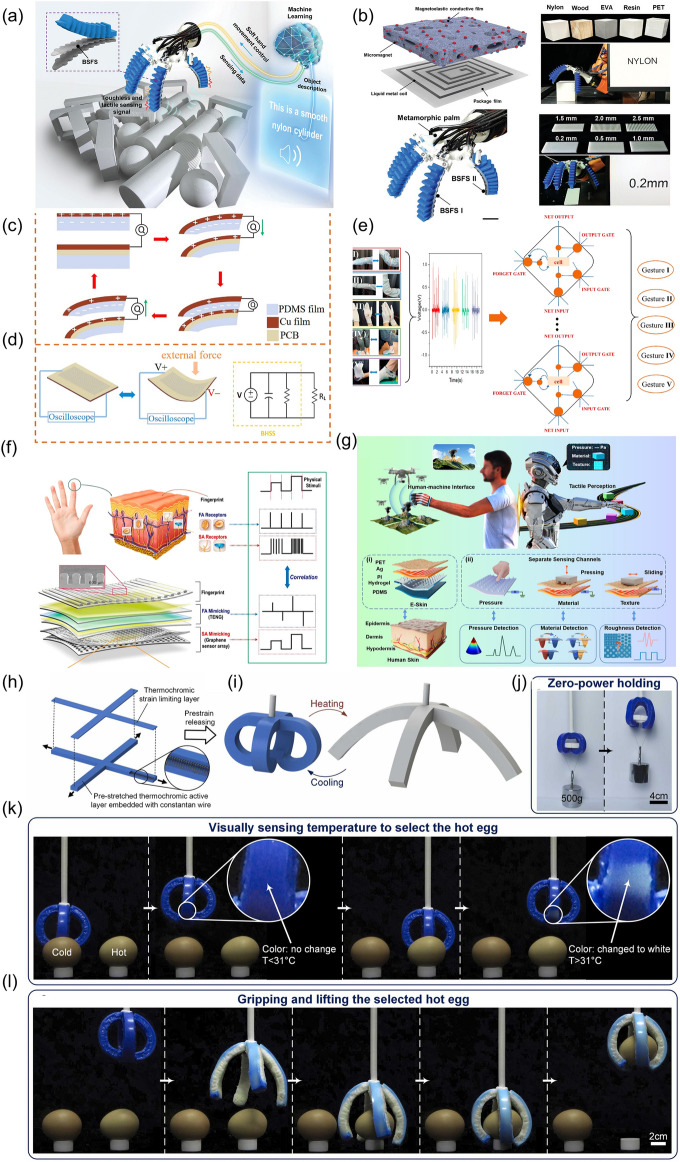
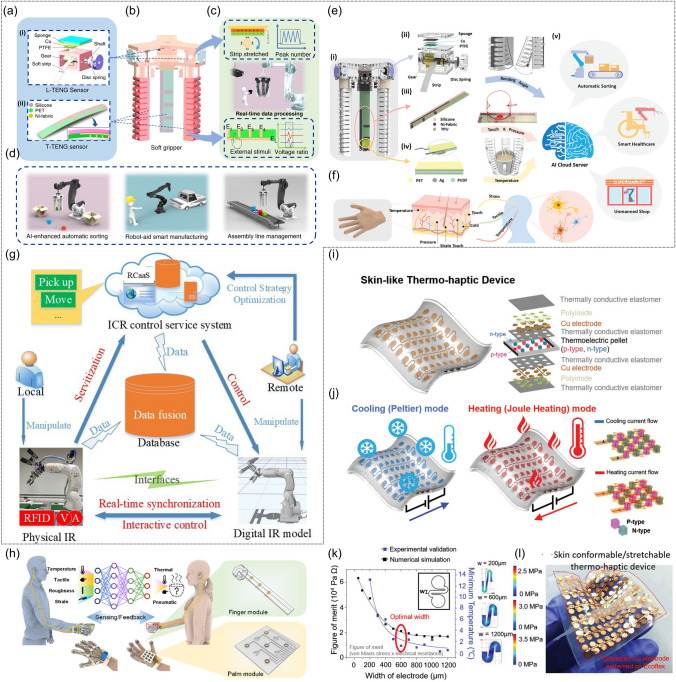
A comprehensive review focused on the whole systems of the soft robotics with artificial intelligence, which can feel, think, react and interact with humans, is presented.
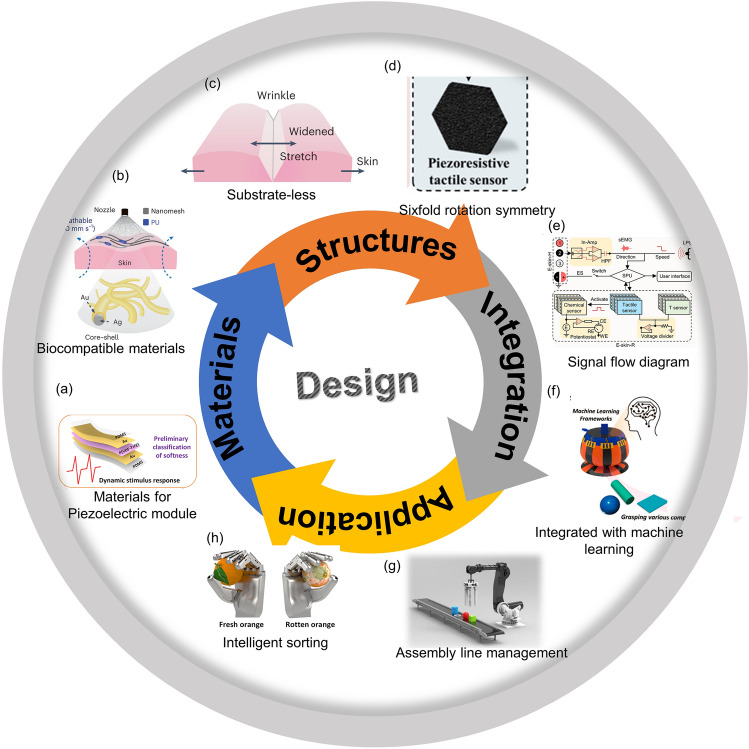
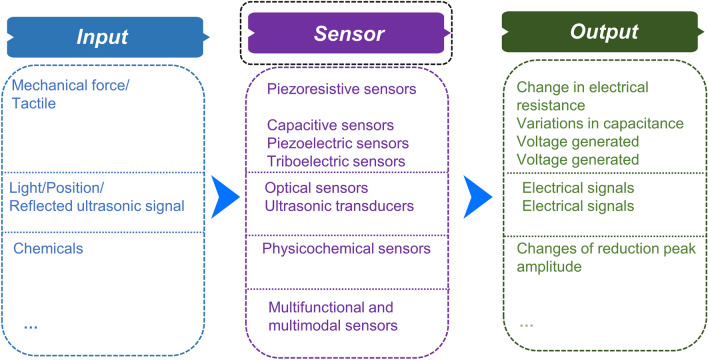
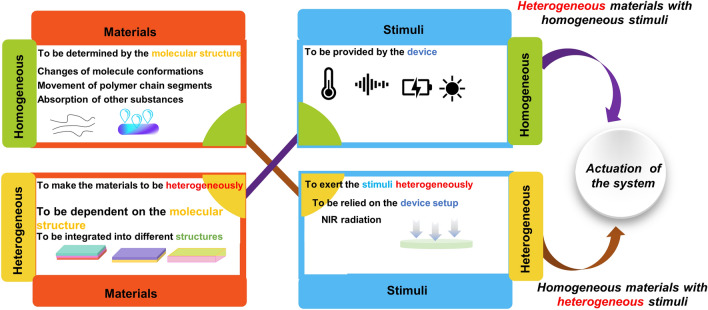
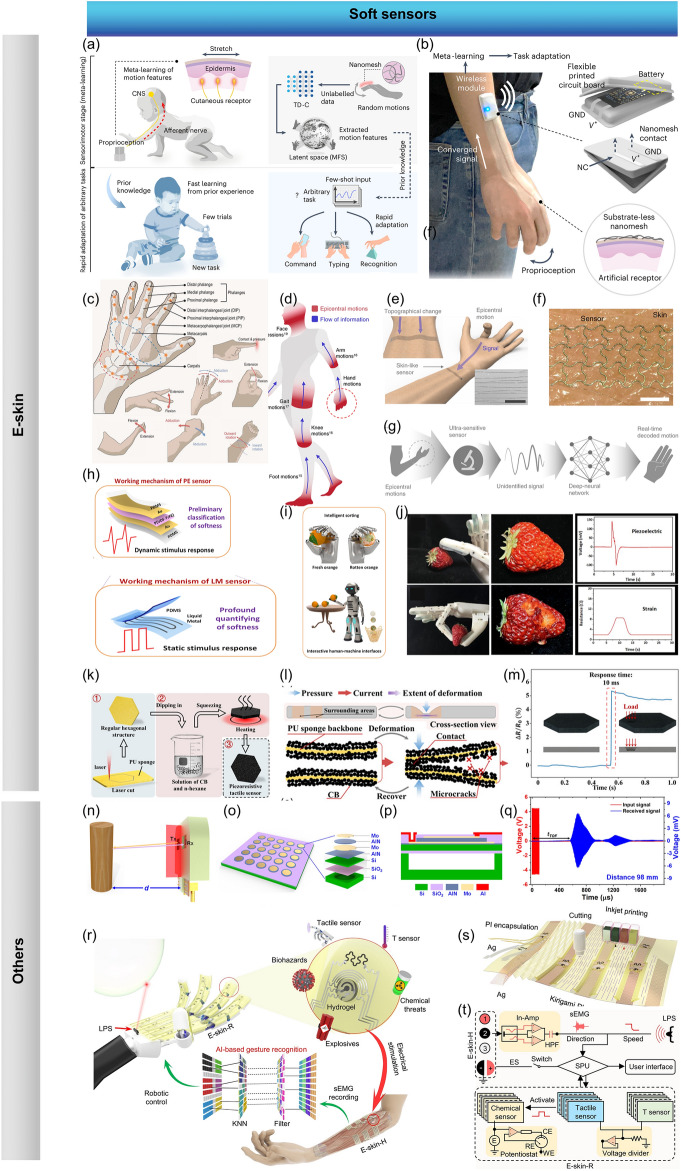
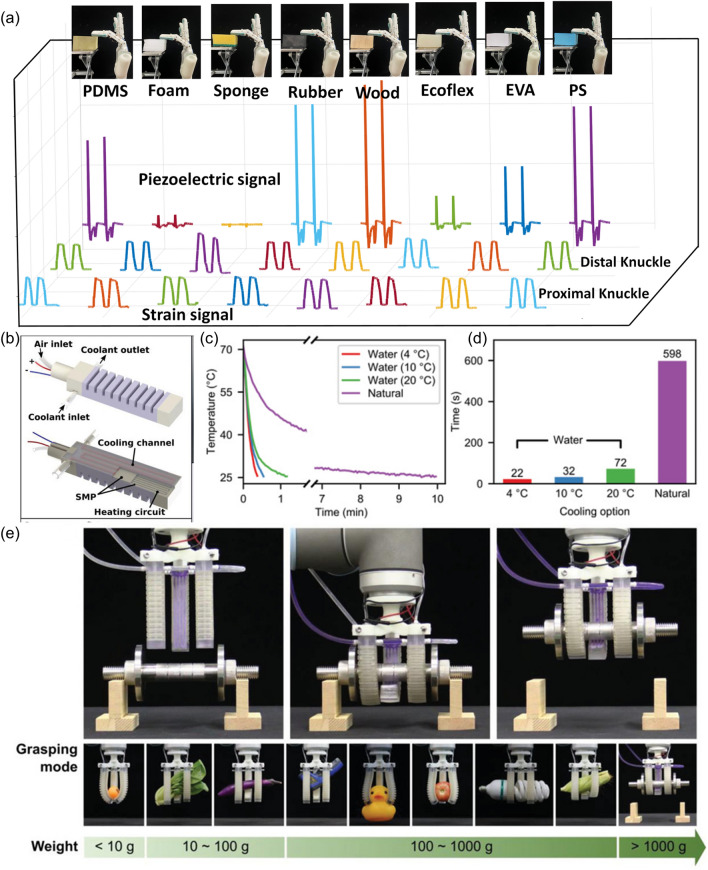
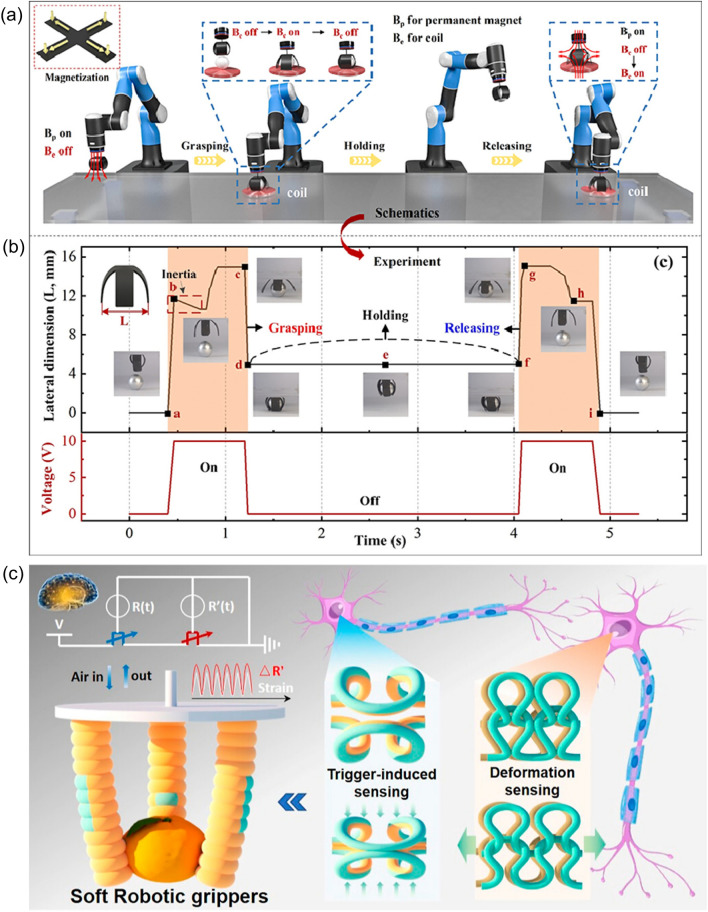
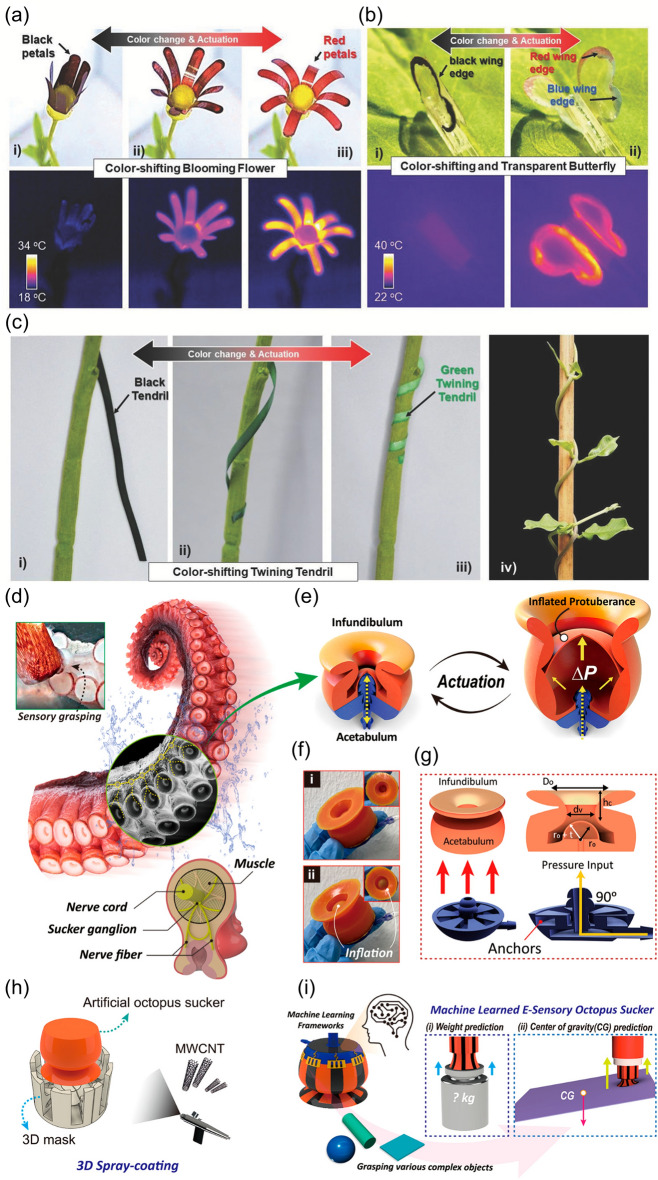
The design strategies concerning about various aspects of the soft robotics, like component materials, device structures, prepared technologies, integrated method, and potential applications, are summarized.
A broad outlook on the future considerations for the soft robots is proposed.
Keywords: Artificial intelligence; Design tactics; Review and perspective; Soft robotic systems.
Conflict of interest statement
The authors declare no interest conflict. They have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Figures
References
-
- M. Lu, J. Yin, Q. Zhu, G. Lin, M. Mou et al., Artificial intelligence in pharmaceutical sciences. Engineering 27, 37–69 (2023). 10.1016/j.eng.2023.01.014 - DOI
-
- J. Sipola, M. Saunila, J. Ukko, Adopting artificial intelligence in sustainable business. J. Clean. Prod. 426, 139197 (2023). 10.1016/j.jclepro.2023.139197 - DOI
-
- S. Stamenković, N. Jovanović, B. Vasović, M. Cvjetković, Z. Jovanović, Software tools for learning artificial intelligence algorithms. Artif. Intell. Rev. 56, 10297–10326 (2023). 10.1007/s10462-023-10436-0 - DOI
Publication types
LinkOut - more resources
Full Text Sources