

Combined representation of visual features in the scene-selective cortex
- PMID: 38871131
- PMCID: PMC11375617
- DOI: 10.1016/j.bbr.2024.115110
Combined representation of visual features in the scene-selective cortex
Abstract
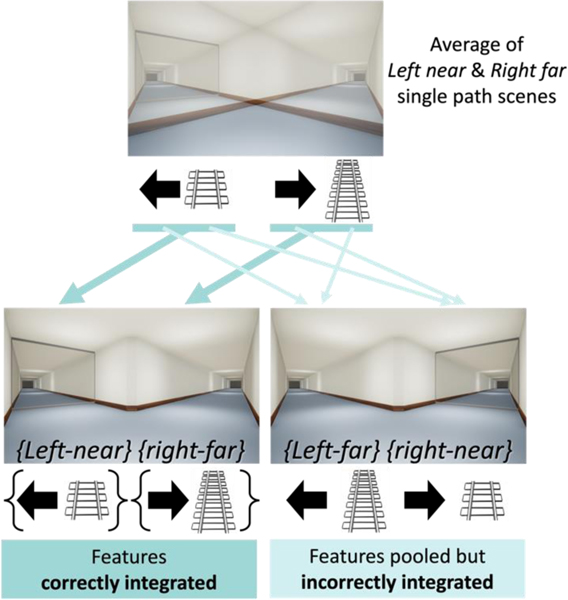
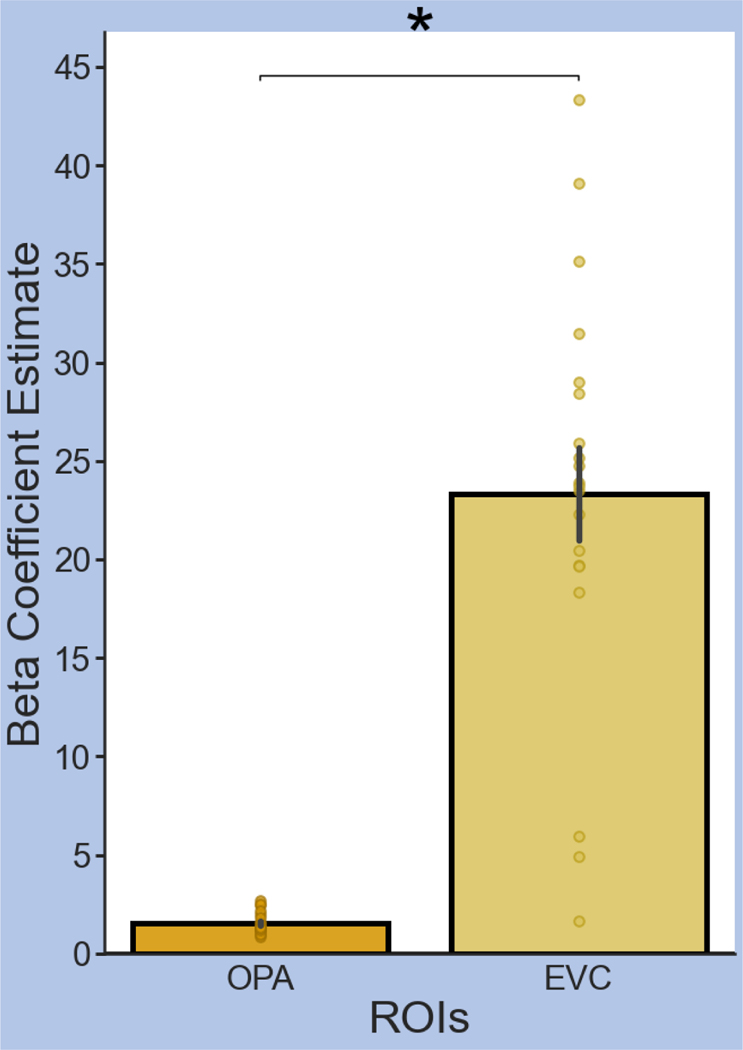
Visual features of separable dimensions conjoin to represent an integrated entity. We investigated how visual features bind to form a complex visual scene. Specifically, we focused on features important for visually guided navigation: direction and distance. Previously, separate works have shown that directions and distances of navigable paths are coded in the occipital place area (OPA). Using functional magnetic resonance imaging (fMRI), we tested how separate features are concurrently represented in the OPA. Participants saw eight types of scenes, in which four of them had one path and the other four had two paths. In single-path scenes, path direction was either to the left or to the right. In double-path scenes, both directions were present. A glass wall was placed in some paths to restrict navigational distance. To test how the OPA represents path directions and distances, we took three approaches. First, the independent-features approach examined whether the OPA codes each direction and distance. Second, the integrated-features approach explored how directions and distances are integrated into path units, as compared to pooled features, using double-path scenes. Finally, the integrated-paths approach asked how separate paths are combined into a scene. Using multi-voxel pattern similarity analysis, we found that the OPA's representations of single-path scenes were similar to other single-path scenes of either the same direction or the same distance. Representations of double-path scenes were similar to the combination of two constituent single-paths, as a combined unit of direction and distance rather than as a pooled representation of all features. These results show that the OPA combines the two features to form path units, which are then used to build multiple-path scenes. Altogether, these results suggest that visually guided navigation may be supported by the OPA that automatically and efficiently combines multiple features relevant for navigation and represent a navigation file.
Keywords: Multi-voxel Pattern Analysis; Navigation File; Occipital Place Area; Scene Perception; Visually Guided Navigation.
Copyright © 2024 Elsevier B.V. All rights reserved.
Figures










Update of
-
Combined representation of visual features in the scene-selective cortex.bioRxiv [Preprint]. 2023 Jul 26:2023.07.24.550280. doi: 10.1101/2023.07.24.550280. bioRxiv. 2023. Update in: Behav Brain Res. 2024 Aug 5;471:115110. doi: 10.1016/j.bbr.2024.115110. PMID: 37546776 Free PMC article. Updated. Preprint.
Similar articles
-
Combined representation of visual features in the scene-selective cortex.bioRxiv [Preprint]. 2023 Jul 26:2023.07.24.550280. doi: 10.1101/2023.07.24.550280. bioRxiv. 2023. Update in: Behav Brain Res. 2024 Aug 5;471:115110. doi: 10.1016/j.bbr.2024.115110. PMID: 37546776 Free PMC article. Updated. Preprint.
-
A scene-selective region in the superior parietal lobule for visually guided navigation.Cereb Cortex. 2025 Apr 1;35(4):bhaf082. doi: 10.1093/cercor/bhaf082. Cereb Cortex. 2025. PMID: 40264261
-
Representation of navigational affordances and ego-motion in the occipital place area.Imaging Neurosci (Camb). 2025 Jan 10;3:imag_a_00424. doi: 10.1162/imag_a_00424. eCollection 2025. Imaging Neurosci (Camb). 2025. PMID: 40800867 Free PMC article.
-
The Black Book of Psychotropic Dosing and Monitoring.Psychopharmacol Bull. 2024 Jul 8;54(3):8-59. Psychopharmacol Bull. 2024. PMID: 38993656 Free PMC article. Review.
-
Falls prevention interventions for community-dwelling older adults: systematic review and meta-analysis of benefits, harms, and patient values and preferences.Syst Rev. 2024 Nov 26;13(1):289. doi: 10.1186/s13643-024-02681-3. Syst Rev. 2024. PMID: 39593159 Free PMC article.
References
-
- Amit E, Mehoudar E, Trope Y, & Yovel G. (2012). Do object-category selective regions in the ventral visual stream represent perceived distance information? Brain and Cognition, 80(2), 201–213. - PubMed
-
- Benjamini Y, & Hochberg Y. (1995). Controlling the false discovery rate: A practical and powerful approach to multiple testing. Journal of the Royal Statistical Society: Series B (Methodological), 57(1), 289–300.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
