

A surgical activity model of laparoscopic cholecystectomy for co-operation with collaborative robots
- PMID: 38872018
- PMCID: PMC11289174
- DOI: 10.1007/s00464-024-10958-w
A surgical activity model of laparoscopic cholecystectomy for co-operation with collaborative robots
Abstract
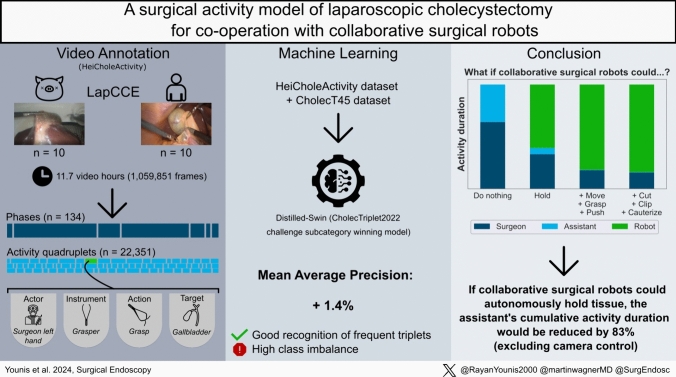
Background: Laparoscopic cholecystectomy is a very frequent surgical procedure. However, in an ageing society, less surgical staff will need to perform surgery on patients. Collaborative surgical robots (cobots) could address surgical staff shortages and workload. To achieve context-awareness for surgeon-robot collaboration, the intraoperative action workflow recognition is a key challenge.
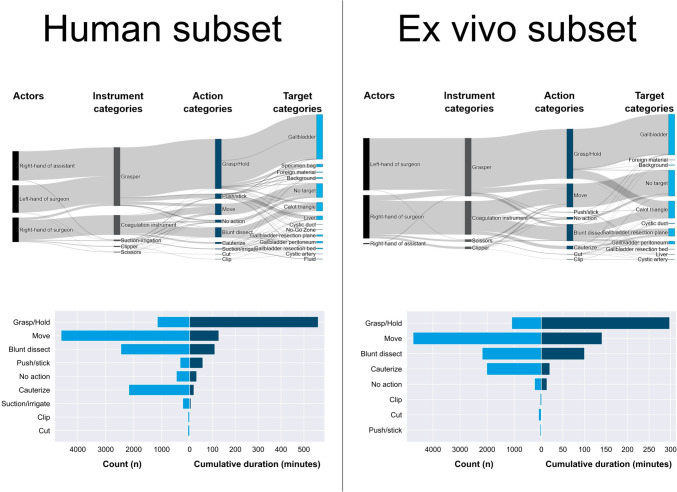
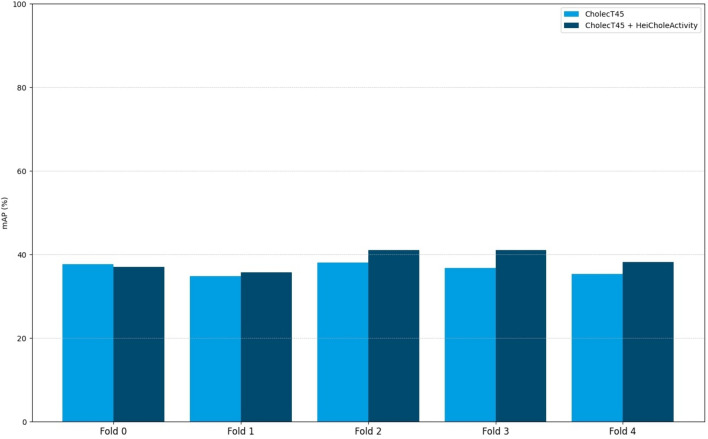
Methods: A surgical process model was developed for intraoperative surgical activities including actor, instrument, action and target in laparoscopic cholecystectomy (excluding camera guidance). These activities, as well as instrument presence and surgical phases were annotated in videos of laparoscopic cholecystectomy performed on human patients (n = 10) and on explanted porcine livers (n = 10). The machine learning algorithm Distilled-Swin was trained on our own annotated dataset and the CholecT45 dataset. The validation of the model was conducted using a fivefold cross-validation approach.
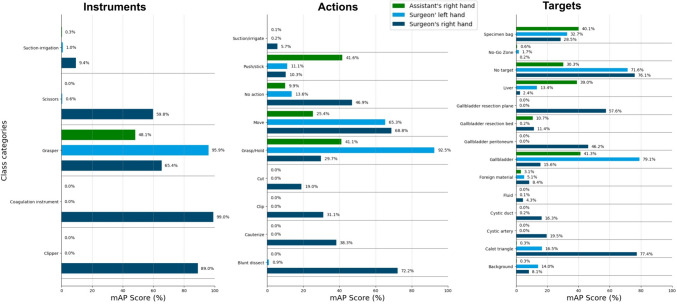
Results: In total, 22,351 activities were annotated with a cumulative duration of 24.9 h of video segments. The machine learning algorithm trained and validated on our own dataset scored a mean average precision (mAP) of 25.7% and a top K = 5 accuracy of 85.3%. With training and validation on our dataset and CholecT45, the algorithm scored a mAP of 37.9%.
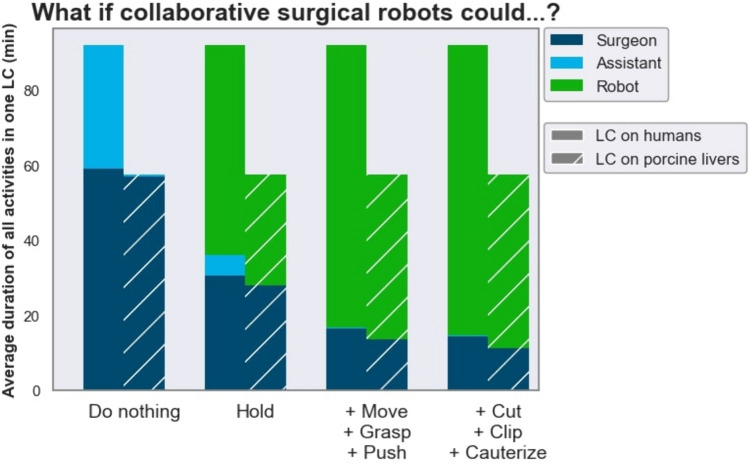
Conclusions: An activity model was developed and applied for the fine-granular annotation of laparoscopic cholecystectomies in two surgical settings. A machine recognition algorithm trained on our own annotated dataset and CholecT45 achieved a higher performance than training only on CholecT45 and can recognize frequently occurring activities well, but not infrequent activities. The analysis of an annotated dataset allowed for the quantification of the potential of collaborative surgical robots to address the workload of surgical staff. If collaborative surgical robots could grasp and hold tissue, up to 83.5% of the assistant's tissue interacting tasks (i.e. excluding camera guidance) could be performed by robots.
Keywords: Action recognition; Collaborative surgical robots; Machine learning; Robot autonomy; Surgical data science; Surgical process modeling.
© 2024. The Author(s).
Conflict of interest statement
Franziska Mathis-Ullrich, Beat Peter Müller-Stich and Martin Wagner are project leaders of the Koala-Grasp project, funded by the German federal ministry of research and education (BMBF) (funding number: 13GW0471D). Stefanie Speidel, Marius Distler, Jürgen Weitz and Martin Wagner are funded by the German Research Foundation (DFG) as part of Germany’s Excellence Strategy—EXC 2050/1—Project ID 390696704—Cluster of Excellence “Centre for Tactile Internet with Human-in-the-Loop” (CeTI) of TUD Dresden University of Technology. Rayan Younis is funded by the National Center for Tumor Diseases Heidelberg within the Cancer Therapy Program Data Science driven Surgical Oncology (DSdSO). Amine Yamlahi, Sebastian Bodenstedt, Paul Maria Scheikl, Anna Kisilenko, Marie Daum, André Schulze, Philipp Anthony Wise, Felix Nickel and Lena Maier-Hein have no conflict of interest or financial ties to disclose.
Figures
References
-
- Statistisches Bundesamt (Destatis) (2023) Krankenhäuser: Die 20 häufigsten Operationen insgesamt (OPS5). https://www.destatis.de/DE/Themen/Gesellschaft-Umwelt/Gesundheit/Kranken.... Accessed 11 May 2024
-
- Ellison EC, Pawlik TM, Way DP, Satiani B, Williams TE (2018) Ten-year reassessment of the shortage of general surgeons: Increases in graduation numbers of general surgery residents are insufficient to meet the future demand for general surgeons. Surgery 164:726–732. 10.1016/j.surg.2018.04.042 10.1016/j.surg.2018.04.042 - DOI - PubMed
-
- Vallböhmer D, Fuchs H, Krones C (2018) Nehmen wir jetzt jeden? eine umfrage in Deutschen chirurgischen kliniken. Passion Chir 8
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
