

Human-in-the-Loop Optimization of Knee Exoskeleton Assistance for Minimizing User's Metabolic and Muscular Effort
- PMID: 38894101
- PMCID: PMC11174841
- DOI: 10.3390/s24113305
Human-in-the-Loop Optimization of Knee Exoskeleton Assistance for Minimizing User's Metabolic and Muscular Effort
Abstract
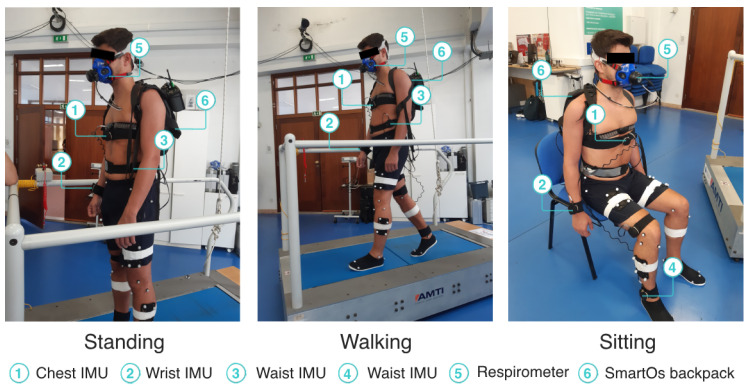
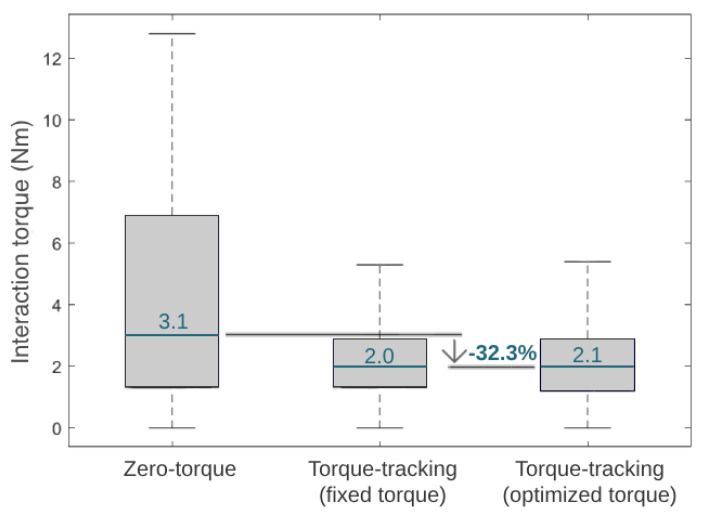
Lower limb exoskeletons have the potential to mitigate work-related musculoskeletal disorders; however, they often lack user-oriented control strategies. Human-in-the-loop (HITL) controls adapt an exoskeleton's assistance in real time, to optimize the user-exoskeleton interaction. This study presents a HITL control for a knee exoskeleton using a CMA-ES algorithm to minimize the users' physical effort, a parameter innovatively evaluated using the interaction torque with the exoskeleton (a muscular effort indicator) and metabolic cost. This work innovates by estimating the user's metabolic cost within the HITL control through a machine-learning model. The regression model estimated the metabolic cost, in real time, with a root mean squared error of 0.66 W/kg and mean absolute percentage error of 26% (n = 5), making faster (10 s) and less noisy estimations than a respirometer (K5, Cosmed). The HITL reduced the user's metabolic cost by 7.3% and 5.9% compared to the zero-torque and no-device conditions, respectively, and reduced the interaction torque by 32.3% compared to a zero-torque control (n = 1). The developed HITL control surpassed a non-exoskeleton and zero-torque condition regarding the user's physical effort, even for a task such as slow walking. Furthermore, the user-specific control had a lower metabolic cost than the non-user-specific assistance. This proof-of-concept demonstrated the potential of HITL controls in assisted walking.
Keywords: exoskeletons; human-in-the-loop control; metabolic cost estimation; work-related musculoskeletal disorders.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures










References
-
- De Kok J., Snijders J., Roullis G., Clarke M., Peereboom K., van Dorst P., Isusi I. Work-Related Musculoskeletal Disorders: Prevalence, Costs and Demographics in the EU. Publications Office of the European Union; Luxembourg: 2019. - DOI
-
- Govaerts R., Tassignon B., Ghillebert J., Serrien B., De Bock S., Ampe T., El Makrini I., Vanderborght B., Meeusen R., De Pauw K. Prevalence and incidence of work-related musculoskeletal disorders in secondary industries of 21st century Europe: A systematic review and meta-analysis. BMC Musculoskelet. Disord. 2021;22:751. doi: 10.1186/s12891-021-04615-9. - DOI - PMC - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
