

Coverage Planning for UVC Irradiation: Robot Surface Disinfection Based on Swarm Intelligence Algorithm
- PMID: 38894209
- PMCID: PMC11174843
- DOI: 10.3390/s24113418
Coverage Planning for UVC Irradiation: Robot Surface Disinfection Based on Swarm Intelligence Algorithm
Abstract
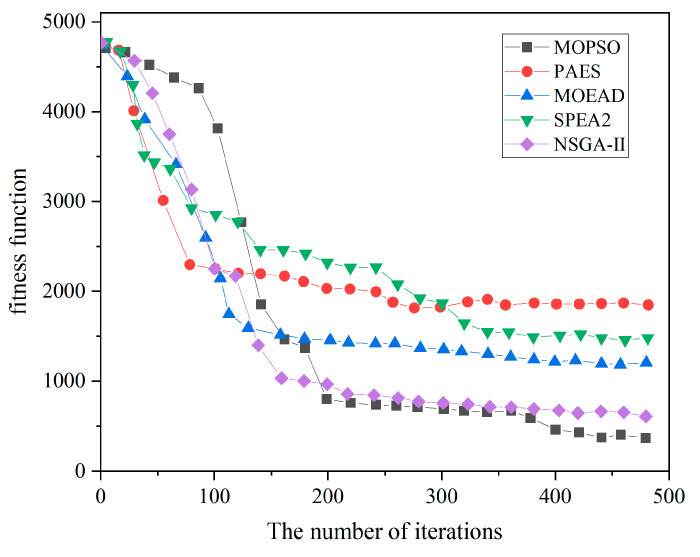
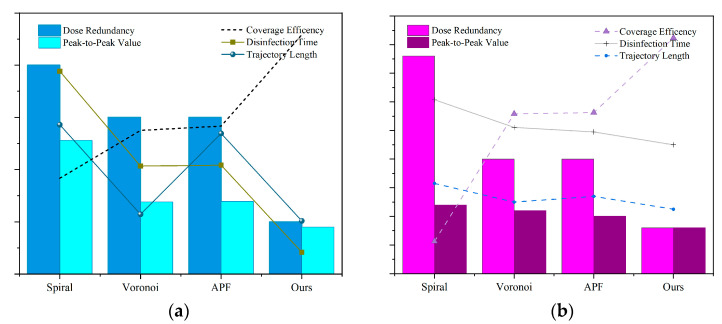
Ultraviolet (UV) radiation has been widely utilized as a disinfection strategy to effectively eliminate various pathogens. The disinfection task achieves complete coverage of object surfaces by planning the motion trajectory of autonomous mobile robots and the UVC irradiation strategy. This introduces an additional layer of complexity to path planning, as every point on the surface of the object must receive a certain dose of irradiation. Nevertheless, the considerable dosage required for virus inactivation often leads to substantial energy consumption and dose redundancy in disinfection tasks, presenting challenges for the implementation of robots in large-scale environments. Optimizing energy consumption of light sources has become a primary concern in disinfection planning, particularly in large-scale settings. Addressing the inefficiencies associated with dosage redundancy, this study proposes a dose coverage planning framework, utilizing MOPSO to solve the multi-objective optimization model for planning UVC dose coverage. Diverging from conventional path planning methodologies, our approach prioritizes the intrinsic characteristics of dose accumulation, integrating a UVC light efficiency factor to mitigate dose redundancy with the aim of reducing energy expenditure and enhancing the efficiency of robotic disinfection. Empirical trials conducted with autonomous disinfecting robots in real-world settings have corroborated the efficacy of this model in deactivating viruses.
Keywords: AIGaN-based UVC LED; coverage path planning; disinfection robot; irradiation planner.
Conflict of interest statement
The authors declare no conflict of interest.
Figures












Similar articles
-
Route Optimization for UVC Disinfection Robot Using Bio-Inspired Metaheuristic Techniques.Biomimetics (Basel). 2024 Dec 5;9(12):744. doi: 10.3390/biomimetics9120744. Biomimetics (Basel). 2024. PMID: 39727748 Free PMC article.
-
UVC LED Irradiation Effectively Inactivates Aerosolized Viruses, Bacteria, and Fungi in a Chamber-Type Air Disinfection System.Appl Environ Microbiol. 2018 Aug 17;84(17):e00944-18. doi: 10.1128/AEM.00944-18. Print 2018 Sep 1. Appl Environ Microbiol. 2018. PMID: 29959245 Free PMC article.
-
Efficient Coverage Path Planning for Mobile Disinfecting Robots Using Graph-Based Representation of Environment.Front Robot AI. 2021 Mar 15;8:624333. doi: 10.3389/frobt.2021.624333. eCollection 2021. Front Robot AI. 2021. PMID: 33791341 Free PMC article.
-
COVID-19 pandemic lesson learned- critical parameters and research needs for UVC inactivation of viral aerosols.J Hazard Mater Adv. 2022 Nov;8:100183. doi: 10.1016/j.hazadv.2022.100183. Epub 2022 Oct 12. J Hazard Mater Adv. 2022. PMID: 36619826 Free PMC article. Review.
-
Ultraviolet C irradiation: A promising approach for the disinfection of public spaces?Sci Total Environ. 2023 Jun 25;879:163007. doi: 10.1016/j.scitotenv.2023.163007. Epub 2023 Mar 23. Sci Total Environ. 2023. PMID: 36965719 Review.
References
Grants and funding
- Nos. 2022YFB3605100 and 2022YFB3605101/National Key Research and Development Program
- No. KY03000031224002/Production Development of Epitaxial Wafers Grown by MOCVD.
- No. 2021GXNSFAA075005/the Natural Science Foundation of Guangxi,
- No. 2021AC20026/Guangxi Science and Technology Base and Talent Special Project,
- No. 2021JJA170187/the Natural Science Foundation of Guangxi Province,
LinkOut - more resources
Full Text Sources
