

Application of Improved Sparrow Search Algorithm to Path Planning of Mobile Robots
- PMID: 38921231
- PMCID: PMC11201462
- DOI: 10.3390/biomimetics9060351
Application of Improved Sparrow Search Algorithm to Path Planning of Mobile Robots
Abstract
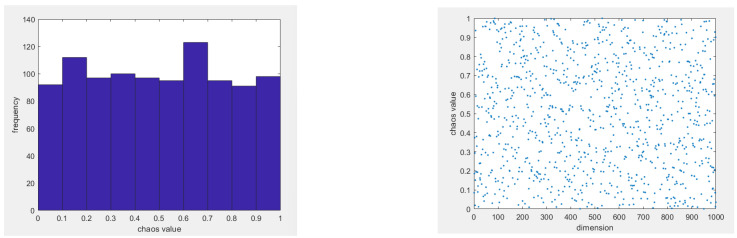
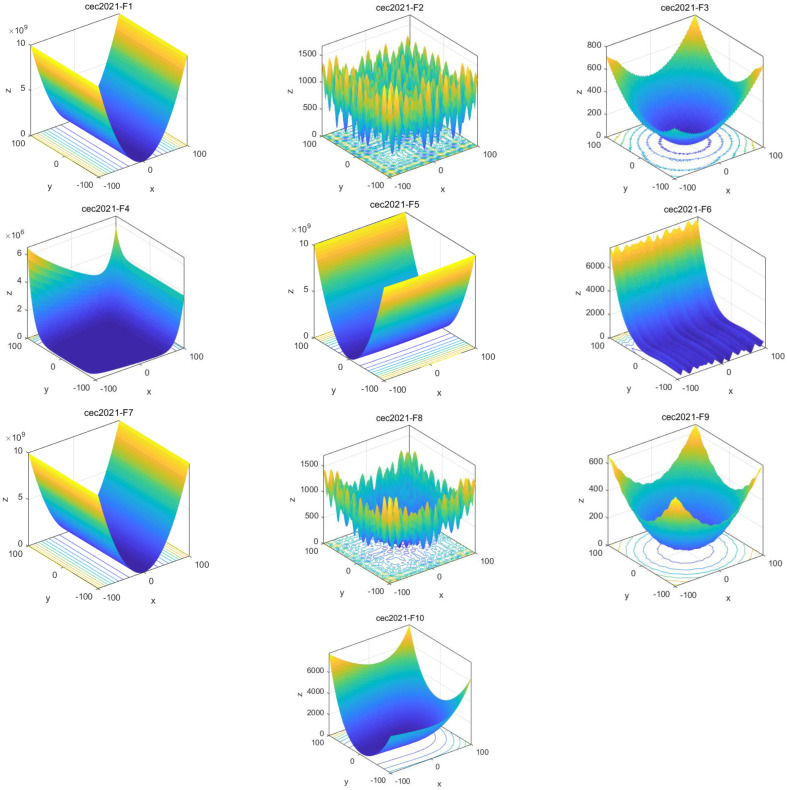
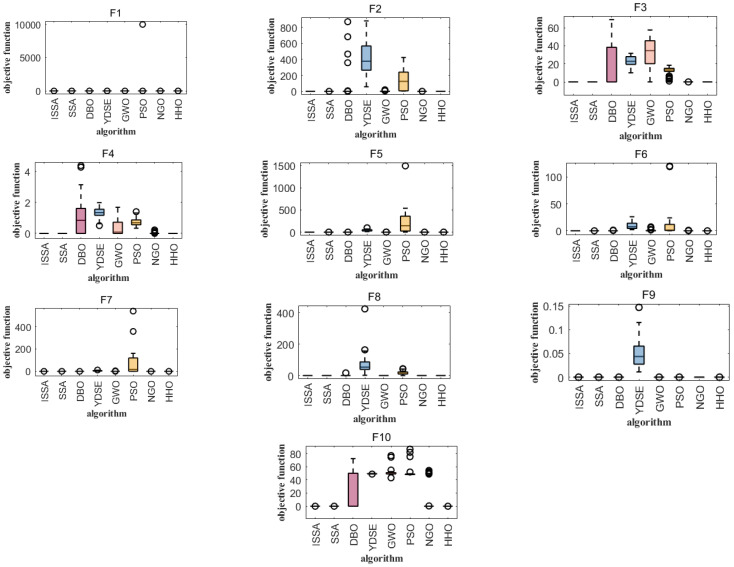
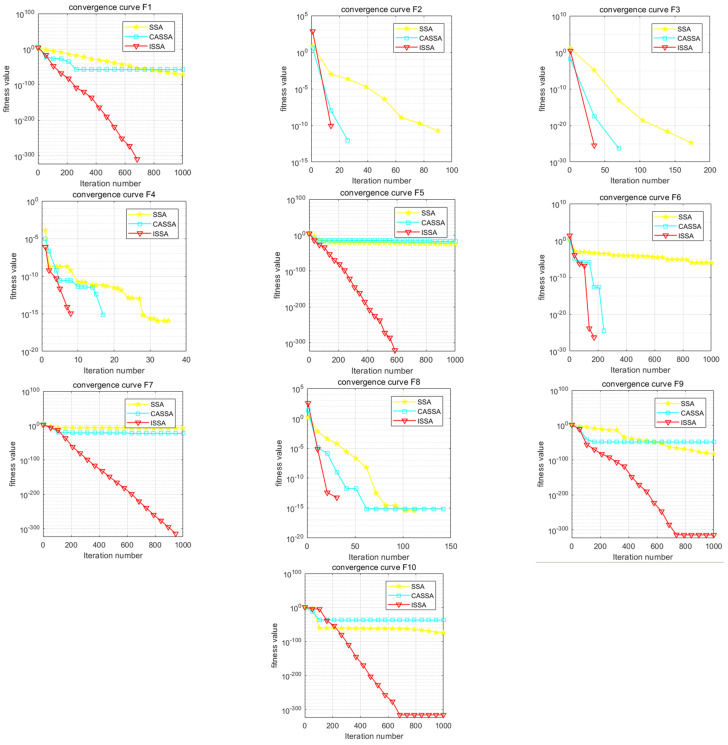
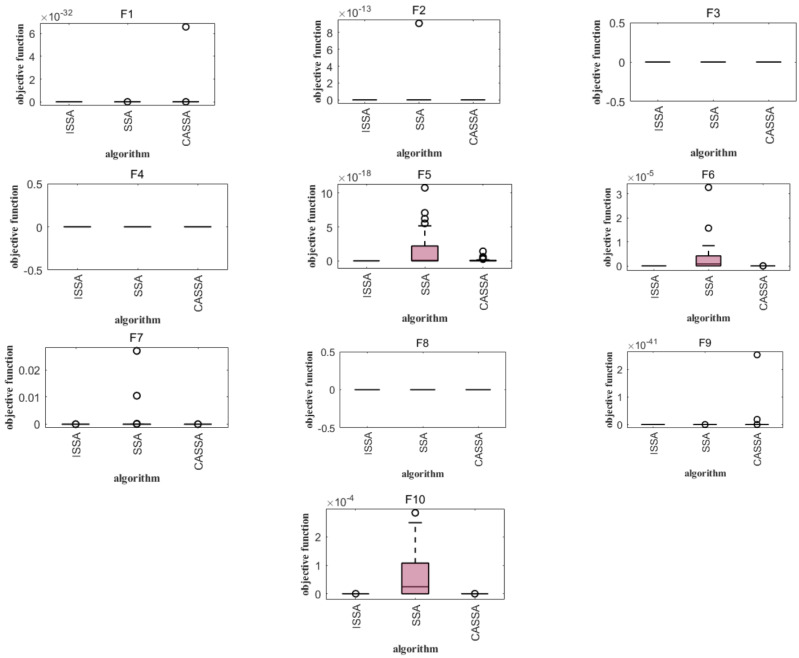
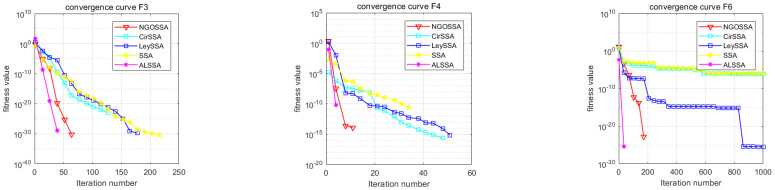
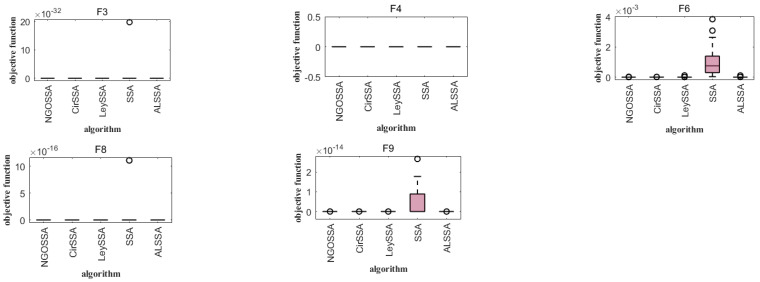
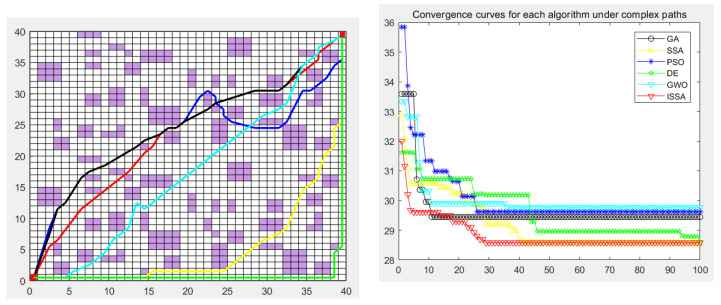
Path planning is an important research direction in the field of robotics; however, with the advancement of modern science and technology, the study of efficient, stable, and safe path-planning technology has become a realistic need in the field of robotics research. This paper introduces an improved sparrow search algorithm (ISSA) with a fusion strategy to further improve the ability to solve challenging tasks. First, the sparrow population is initialized using circle chaotic mapping to enhance diversity. Second, the location update formula of the northern goshawk is used in the exploration phase to replace the sparrow search algorithm's location update formula in the security situation. This improves the discoverer model's search breadth in the solution space and optimizes the problem-solving efficiency. Third, the algorithm adopts the Lévy flight strategy to improve the global optimization ability, so that the sparrow jumps out of the local optimum in the later stage of iteration. Finally, the adaptive T-distribution mutation strategy enhances the local exploration ability in late iterations, thus improving the sparrow search algorithm's convergence speed. This was applied to the CEC2021 function set and compared with other standard intelligent optimization algorithms to test its performance. In addition, the ISSA was implemented in the path-planning problem of mobile robots. The comparative study shows that the proposed algorithm is superior to the SSA in terms of path length, running time, path optimality, and stability. The results show that the proposed method is more effective, robust, and feasible in mobile robot path planning.
Keywords: Lévy flight strategy; adaptive T-distribution variation strategy; circle chaotic mapping; integration of northern goshawk exploration phase location strategy; path planning; sparrow search algorithm.
Conflict of interest statement
The authors declare no conflict of interest.
Figures





Similar articles
-
Dynamic Path Planning of Mobile Robot Based on Improved Sparrow Search Algorithm.Biomimetics (Basel). 2023 Apr 27;8(2):182. doi: 10.3390/biomimetics8020182. Biomimetics (Basel). 2023. PMID: 37218768 Free PMC article.
-
Intelligent Path Planning with an Improved Sparrow Search Algorithm for Workshop UAV Inspection.Sensors (Basel). 2024 Feb 8;24(4):1104. doi: 10.3390/s24041104. Sensors (Basel). 2024. PMID: 38400262 Free PMC article.
-
Modified Sparrow Search Algorithm by Incorporating Multi-Strategy for Solving Mathematical Optimization Problems.Biomimetics (Basel). 2025 May 8;10(5):299. doi: 10.3390/biomimetics10050299. Biomimetics (Basel). 2025. PMID: 40422129 Free PMC article.
-
Improved Sparrow Algorithm Based on Game Predatory Mechanism and Suicide Mechanism.Comput Intell Neurosci. 2022 May 16;2022:4925416. doi: 10.1155/2022/4925416. eCollection 2022. Comput Intell Neurosci. 2022. PMID: 35615547 Free PMC article. Review.
-
Path Planning Trends for Autonomous Mobile Robot Navigation: A Review.Sensors (Basel). 2025 Feb 16;25(4):1206. doi: 10.3390/s25041206. Sensors (Basel). 2025. PMID: 40006435 Free PMC article. Review.
References
-
- Zhu D., Yan M. Overview of path planning technology for mobile robots. Control Decis. Mak. 2010;25:961–967.
-
- Dai B., Xiao X., Cai Z. The research status and prospects of path planning technology for mobile robots. Control Eng. 2005;12:198–202.
-
- Zhang Y., Zhang A., Zhang Z., Zhang J. Tactical Flight Path Planning Algorithm. J. Transp. Eng. 2006;6:84–87.
-
- Le Y., Gong J. An Efficient Implementation of Dijkstra’s Shortest Path Algorithm. Geomat. Inf. Sci. Wuhan Univ. 1999;3:209–212.
-
- Li J., Sun X. Research on UAV trajectory planning algorithm based on improved A-Star algorithm. J. Ordnance Ind. 2008;29:788–792.
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
