

Bio-inspired compensatory strategies for damage to flapping robotic propulsors
- PMID: 38955227
- PMCID: PMC11335061
- DOI: 10.1098/rsif.2024.0141
Bio-inspired compensatory strategies for damage to flapping robotic propulsors
Abstract
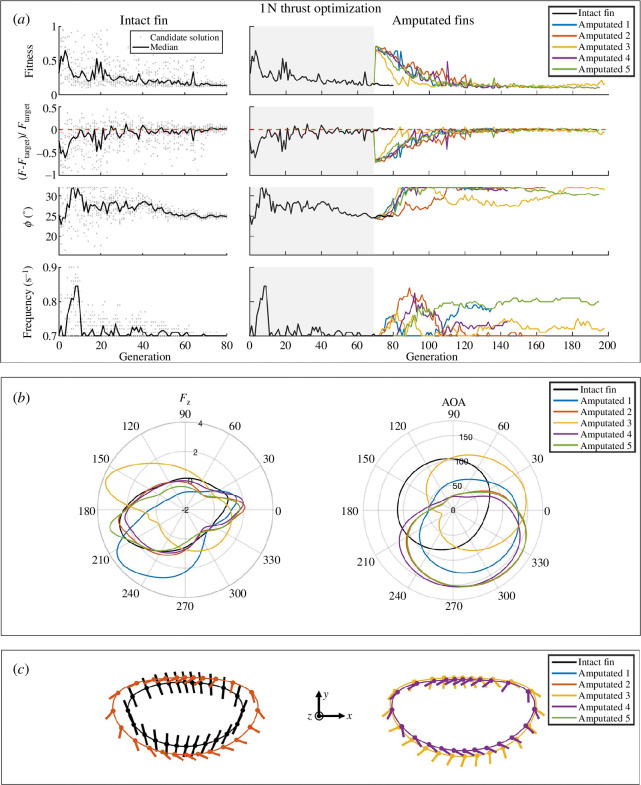
Natural swimmers and flyers can fully recover from catastrophic propulsor damage by altering stroke mechanics: some fish can lose even 76% of their propulsive surface without loss of thrust. We consider applying these principles to enable robotic flapping propulsors to autonomously repair functionality. However, direct transference of these alterations from an organism to a robotic flapping propulsor may be suboptimal owing to irrelevant evolutionary pressures. Instead, we use machine learning techniques to compare these alterations with those optimal for a robotic system. We implement an online artificial evolution with hardware-in-the-loop, performing experimental evaluations with a flexible plate. To recoup thrust, the learned strategy increased amplitude, frequency and angle of attack (AOA) amplitude, and phase-shifted AOA by approximately 110°. Only amplitude increase is reported by most fish literature. When recovering side force, we find that force direction is correlated with AOA. No clear amplitude or frequency trend is found, whereas frequency increases in most insect literature. These results suggest that how mechanical flapping propulsors most efficiently adjust to damage may not align with natural swimmers and flyers.
Keywords: covariance matrix adaptation evolutionary strategy; evolutionary algorithm; flapping propulsion; propulsor damage; self-repairing functionality; stroke mechanics.
Conflict of interest statement
We declare we have no competing interests.
Figures




References
-
- Fish FE. 2013. Advantages of natural propulsive systems. Mar. Technol. Soc. J. 47 , 37–44. ( 10.4031/MTSJ.47.5.2) - DOI
-
- Hedenström A, Ellington CP, Wolf TJ. 2001. Wing wear, aerodynamics and flight energetics in bumblebees (Bombus terrestris): an experimental study. Funct. Ecol. 15 , 417–422. ( 10.1046/j.0269-8463.2001.00531.x) - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
