

Research on the characteristics of electro-hydraulic position servo system of RBF neural network under fuzzy rules
- PMID: 38961072
- PMCID: PMC11222530
- DOI: 10.1038/s41598-024-64262-7
Research on the characteristics of electro-hydraulic position servo system of RBF neural network under fuzzy rules
Abstract
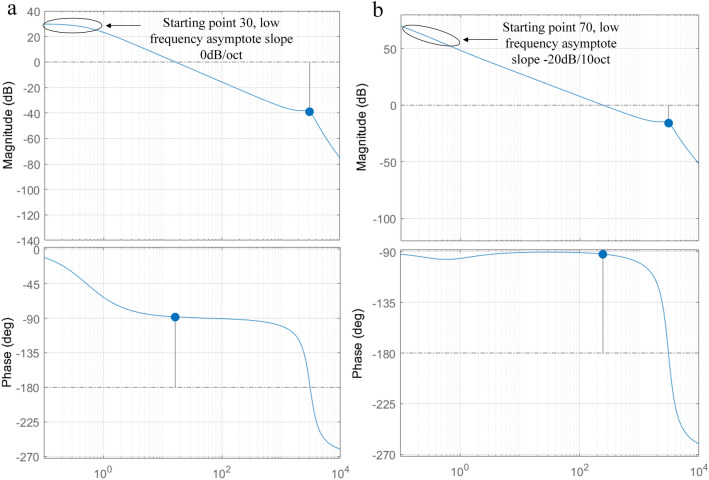
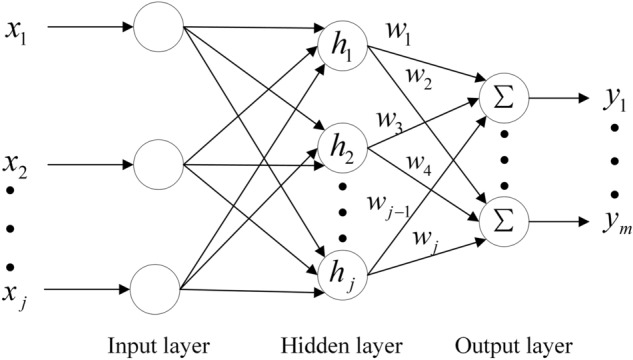
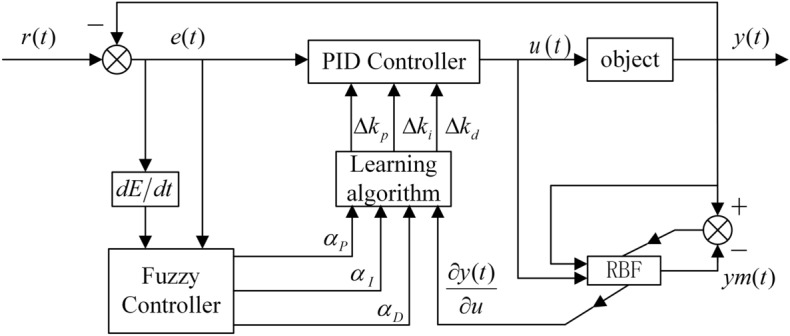
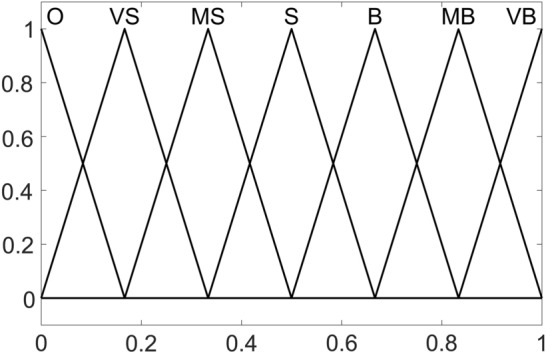
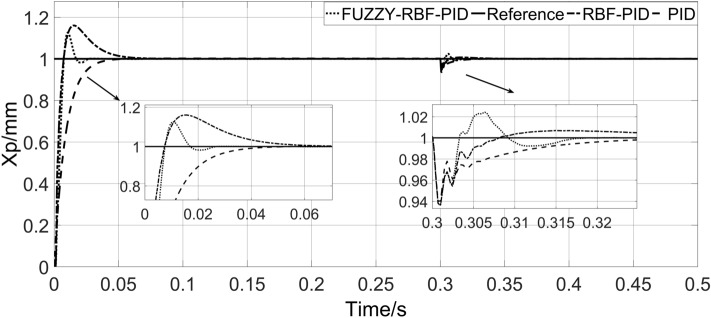
A radial basis function neural network PID controller under fuzzy rules (FUZZY-RBF-PID) was designed for the electro-hydraulic position servo system under the influence of uncertain factors such as load mutation, and load stiffness change. Firstly, the mathematical model of the system is established, and the frequency domain and time domain analysis of the system are carried out. Secondly, based on the analysis results, a radial basis function (RBF) neural network PID controller is designed, and fuzzy rules are innovatively used to adjust the learning rate of PID parameters in the RBF neural network learning algorithm in real time. Thirdly, the simulation results show that under the action of the FUZZY-RBF-PID controller, the unit step response of the system has high steady-state accuracy, fast response speed, and under the condition of large load stiffness, the system can recover to the steady-state value faster after being disturbed. At the same time, when the input signal is the sinusoidal signal of 10 HZ, the system under the action of the FUZZY-RBF-PID controller has no obvious phase lag phenomenon, and the tracking error is minimal. The proposed method can effectively improve the comprehensive performance of the electro-hydraulic position servo system under the influence of uncertain factors.
Keywords: Electro-hydraulic position servo system; Fuzzy rules; Load stiffness; PID parameter learning rate; Phase lag; RBF neural network.
© 2024. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures









Similar articles
-
A new adaptive sliding mode controller based on the RBF neural network for an electro-hydraulic servo system.ISA Trans. 2022 Oct;129(Pt A):472-484. doi: 10.1016/j.isatra.2021.12.044. Epub 2022 Jan 10. ISA Trans. 2022. PMID: 35067353
-
Optimized PID Controller Based on Beetle Antennae Search Algorithm for Electro-Hydraulic Position Servo Control System.Sensors (Basel). 2019 Jun 18;19(12):2727. doi: 10.3390/s19122727. Sensors (Basel). 2019. PMID: 31216632 Free PMC article.
-
Real-Time Hybrid Test Control Research Based on Improved Electro-Hydraulic Servo Displacement Algorithm.Sensors (Basel). 2023 May 15;23(10):4765. doi: 10.3390/s23104765. Sensors (Basel). 2023. PMID: 37430679 Free PMC article.
-
A Novel Fuzzy Controller for Visible-Light Camera Using RBF-ANN: Enhanced Positioning and Autofocusing.Sensors (Basel). 2022 Nov 9;22(22):8657. doi: 10.3390/s22228657. Sensors (Basel). 2022. PMID: 36433252 Free PMC article.
-
Adaptive fuzzy PID cross coupled control for multi-axis motion system based on sliding mode disturbance observation.Sci Prog. 2021 Apr-Jun;104(2):368504211011847. doi: 10.1177/00368504211011847. Sci Prog. 2021. PMID: 33913385 Free PMC article.
Cited by
-
Multiple quadrants displacement tracking control of independent metering electro-hydraulic system.Sci Rep. 2024 Sep 20;14(1):21951. doi: 10.1038/s41598-024-71147-2. Sci Rep. 2024. PMID: 39304690 Free PMC article.
-
Deep reinforcement learning enhanced PID control for hydraulic servo systems in injection molding machines.Sci Rep. 2025 Jul 2;15(1):23005. doi: 10.1038/s41598-025-05904-2. Sci Rep. 2025. PMID: 40596206 Free PMC article.
References
-
- Yin XX, Zhang WC, Jiang ZS, Li P. Adaptive robust integral sliding mode pitch angle control of an electro-hydraulic servo pitch system for wind turbine. Mech. Syst. Sign. Pr. 2019;133(4):105704. doi: 10.1016/j.ymssp.2018.09.026. - DOI
-
- Nie SC, Qian LF, Chen LM, Tian LF, Zou Q. Barrier Lyapunov functions-based dynamic surface control with tracking error constraints for ammunition manipulator electro-hydraulic system. Def. Technol. 2021;17(3):836–845. doi: 10.1016/j.dt.2020.04.010. - DOI
-
- Feng H, Ma W, Yin CB, Cao DH. Trajectory control of electro-hydraulic position servo system using improved PSO-PID controller. Automat. Constr. 2021;127(7):103722. doi: 10.1016/j.autcon.2021.103722. - DOI
-
- Wang YF, Zhao JY, Ding HG, Zhang H. Output feedback control of electro-hydraulic asymmetric cylinder system with disturbances rejection. J. Frankl. I. 2020;358(3):1839–1859. doi: 10.1016/j.jfranklin.2020.12.023. - DOI
-
- Shen W, Shen C. An extended state observer-based control design for electro-hydraulic position servomechanism. Control Eng. Pract. 2021;109:104730. doi: 10.1016/j.conengprac.2021.104730. - DOI
LinkOut - more resources
Full Text Sources
