

Human navigation strategies and their errors result from dynamic interactions of spatial uncertainties
- PMID: 38971789
- PMCID: PMC11227593
- DOI: 10.1038/s41467-024-49722-y
Human navigation strategies and their errors result from dynamic interactions of spatial uncertainties
Abstract
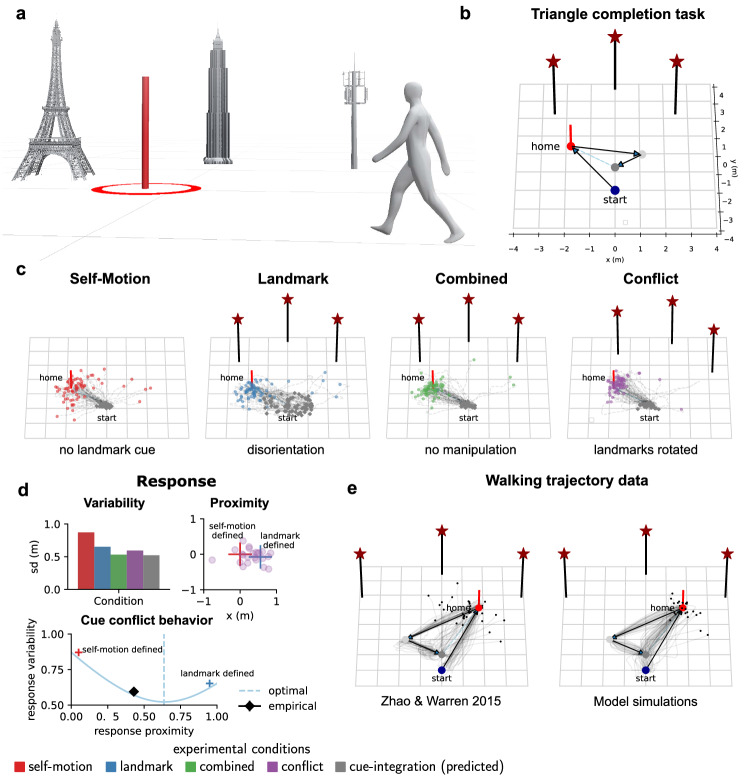
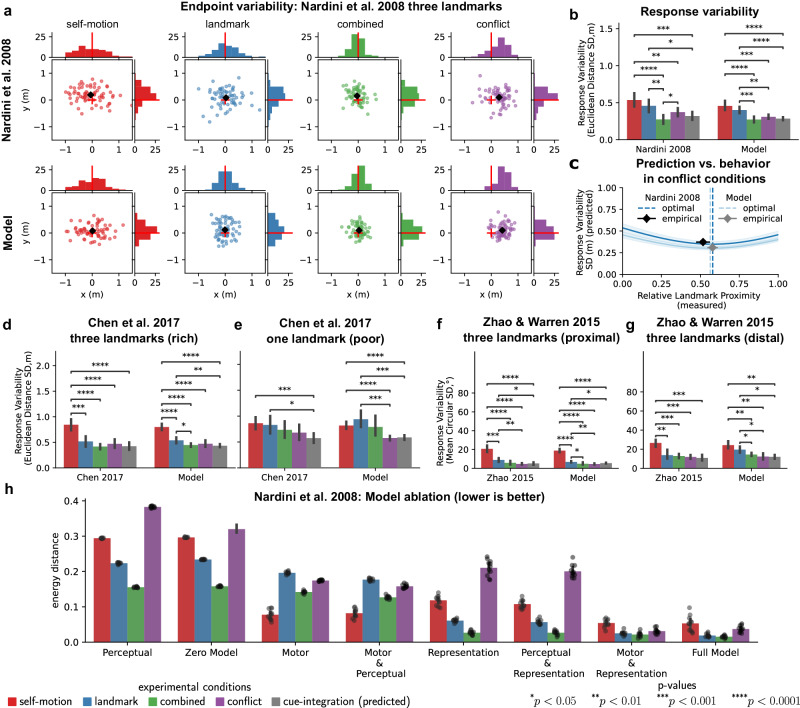
Goal-directed navigation requires continuously integrating uncertain self-motion and landmark cues into an internal sense of location and direction, concurrently planning future paths, and sequentially executing motor actions. Here, we provide a unified account of these processes with a computational model of probabilistic path planning in the framework of optimal feedback control under uncertainty. This model gives rise to diverse human navigational strategies previously believed to be distinct behaviors and predicts quantitatively both the errors and the variability of navigation across numerous experiments. This furthermore explains how sequential egocentric landmark observations form an uncertain allocentric cognitive map, how this internal map is used both in route planning and during execution of movements, and reconciles seemingly contradictory results about cue-integration behavior in navigation. Taken together, the present work provides a parsimonious explanation of how patterns of human goal-directed navigation behavior arise from the continuous and dynamic interactions of spatial uncertainties in perception, cognition, and action.
© 2024. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures


References
-
- Gallistel, C. R. The Organization of Learning. (The MIT Press, 1990).
MeSH terms
LinkOut - more resources
Full Text Sources
