

Optimizing the Steering of Driverless Personal Mobility Pods with a Novel Differential Harris Hawks Optimization Algorithm (DHHO) and Encoder Modeling
- PMID: 39066048
- PMCID: PMC11281304
- DOI: 10.3390/s24144650
Optimizing the Steering of Driverless Personal Mobility Pods with a Novel Differential Harris Hawks Optimization Algorithm (DHHO) and Encoder Modeling
Abstract
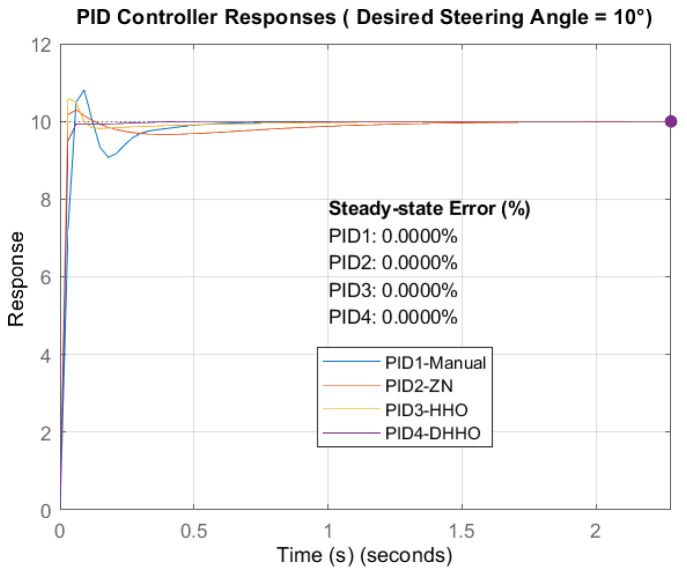
This paper aims to improve the steering performance of the Ackermann personal mobility scooter based on a new meta-heuristic optimization algorithm named Differential Harris Hawks Optimization (DHHO) and the modeling of the steering encoder. The steering response in the Ackermann mechanism is crucial for automated driving systems (ADS), especially in localization and path-planning phases. Various methods presented in the literature are used to control the steering, and meta-heuristic optimization algorithms have achieved prominent results. Harris Hawks optimization (HHO) algorithm is a recent algorithm that outperforms state-of-the-art algorithms in various optimization applications. However, it has yet to be applied to the steering control application. The research in this paper was conducted in three stages. First, practical experiments were performed on the steering encoder sensor that measures the steering angle of the Landlex mobility scooter, and supervised learning was applied to model the results obtained for the steering control. Second, the DHHO algorithm is proposed by introducing mutation between hawks in the exploration phase instead of the Hawks perch technique, improving population diversity and reducing premature convergence. The simulation results on CEC2021 benchmark functions showed that the DHHO algorithm outperforms the HHO, PSO, BAS, and CMAES algorithms. The mean error of the DHHO is improved with a confidence level of 99.8047% and 91.6016% in the 10-dimension and 20-dimension problems, respectively, compared with the original HHO. Third, DHHO is implemented for interactive real-time PID tuning to control the steering of the Ackermann scooter. The practical transient response results showed that the settling time is improved by 89.31% compared to the original response with no overshoot and steady-state error, proving the superior performance of the DHHO algorithm compared to the traditional control methods.
Keywords: Ackermann steering; CEC2020 benchmark; Harris Hawks optimization; driverless pod; electric power steering; steering angle encoder; steering control; transient response.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures










References
-
- Montazerijouybari M. Ph.D. Thesis. Ecole Polytechnique; Montreal, QC, Canada: 2022. Dynamics of Differential Drive Wheel Mobile Robot with Free Caster Wheels.
-
- Ueno Y., Ikemura I., Tanaka T., Matsuo Y. Development of a Front-Wheel-Steering-Drive Dual-Wheel Caster Drive Mechanism for Omni-Directional Wheelchairs with High Step Climbing Performance. J. Robot. Mechatron. 2022;34:1431–1440. doi: 10.20965/jrm.2022.p1431. - DOI
-
- Khan R., Malik F.M., Raza A., Mazhar N. Comprehensive study of skid-steer wheeled mobile robots: Development and challenges. Ind. Robot. Int. J. Robot. Res. Appl. 2021;48:142–156. doi: 10.1108/IR-04-2020-0082. - DOI
-
- Xiao Z., Xiao B. Research on all-wheel steering control strategy for the three-wheel forklift. J. Mech. Sci. Technol. 2016;30:4717–4724. doi: 10.1007/s12206-016-0943-6. - DOI
-
- Lee D., Yeo S. A Study on Maneuvering Control Algorithm Based on All-wheel Independent Driving and Steering Control for Special Purpose 6WD/6WS Vehicles. J. Korea Inst. Mil. Sci. Technol. 2013;16:240–249. doi: 10.9766/KIMST.2013.16.3.240. - DOI
LinkOut - more resources
Full Text Sources
