

Positional Analysis of Assisting Muscles for Handling-Assisted Exoskeletons
- PMID: 39066070
- PMCID: PMC11280825
- DOI: 10.3390/s24144673
Positional Analysis of Assisting Muscles for Handling-Assisted Exoskeletons
Abstract
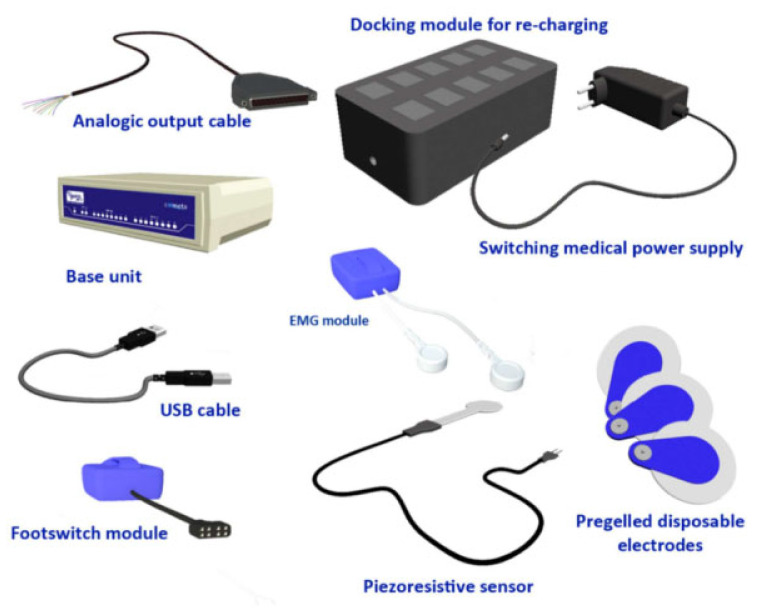
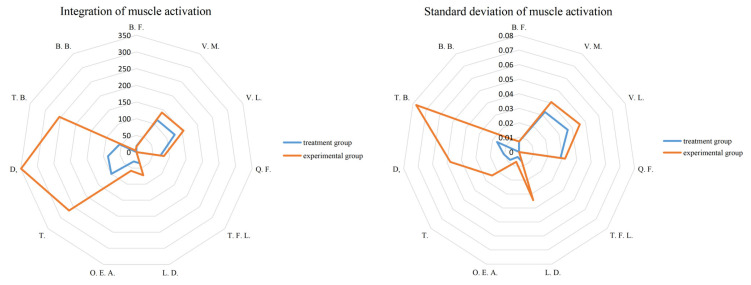
In order to better design handling-assisted exoskeletons, it is necessary to analyze the biomechanics of human hand movements. In this study, Anybody Modeling System (AMS) simulation was used to analyze the movement state of muscles during human handling. Combined with surface electromyography (sEMG) experiments, specific analysis and verification were carried out to obtain the position of muscles that the human body needs to assist during handling. In this study, the simulation and experiment were carried out for the manual handling process. A treatment group and an experimental group were set up. This study found that the vastus medialis muscle, vastus lateralis muscle, latissimus dorsi muscle, trapezius muscle, deltoid muscle and triceps brachii muscle require more energy in the process of handling, and it is reasonable and effective to combine sEMG signals with the simulation of the musculoskeletal model to analyze the muscle condition of human movement.
Keywords: Anybody Modeling System; assisted exoskeletons; muscle activation; surface electromyography.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures









References
-
- Ali A., Maureen F.D., Nick G., Richard W.M., Tessa S.B., Ha N., Cherie C. Work-related psychosocial and physical paths to future musculoskeletal disorders (MSDs) Saf. Sci. 2023;164:106177. doi: 10.1016/j.ssci.2023.106177. - DOI
-
- Jirapongsuwan A., Klainin-Yobas P., Songkham W., Somboon S., Pumsopa N., Bhatarasakoon P. The effectiveness of ergonomic intervention for preventing work-related musculoskeletal disorders in agricultural workers: A systematic review protocol. PLoS ONE. 2023;18:e0288131. doi: 10.1371/journal.pone.0288131. - DOI - PMC - PubMed
-
- Tröster M., Budde S., Maufroy C., Andersen M.S., Rasmussen J., Schneider U., Bauernhansl T. Biomechanical Analysis of Stoop and Free-Style Squat handling and Lowering with a Generic Back-Support Exoskeleton Model. Int. J. Environ. Res. Public Health. 2022;19:9040. doi: 10.3390/ijerph19159040. - DOI - PMC - PubMed
-
- Hayashi T., Kawamoto H., Sankai Y. Control method of robot suit HAL working as operator’s muscle using biological and dynamical information; Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems; Edmonton, AB, Canada. 2–6 August 2005; pp. 3063–3068. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
