

Feedback control of heart rate during robotics-assisted tilt table exercise in patients after stroke: a clinical feasibility study
- PMID: 39135048
- PMCID: PMC11318246
- DOI: 10.1186/s12984-024-01440-8
Feedback control of heart rate during robotics-assisted tilt table exercise in patients after stroke: a clinical feasibility study
Abstract
Background: Patients with neurological disorders including stroke use rehabilitation to improve cognitive abilities, to regain motor function and to reduce the risk of further complications. Robotics-assisted tilt table technology has been developed to provide early mobilisation and to automate therapy involving the lower limbs. The aim of this study was to evaluate the feasibility of employing a feedback control system for heart rate (HR) during robotics-assisted tilt table exercise in patients after a stroke.
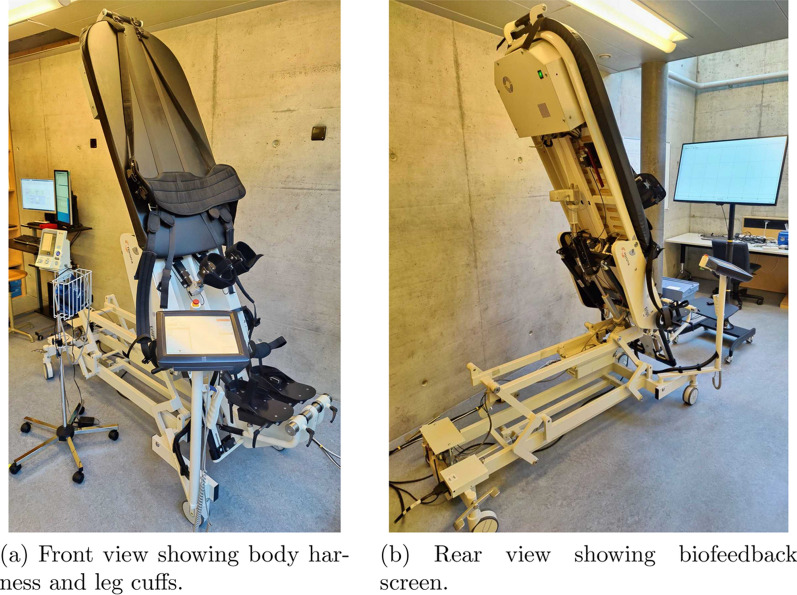
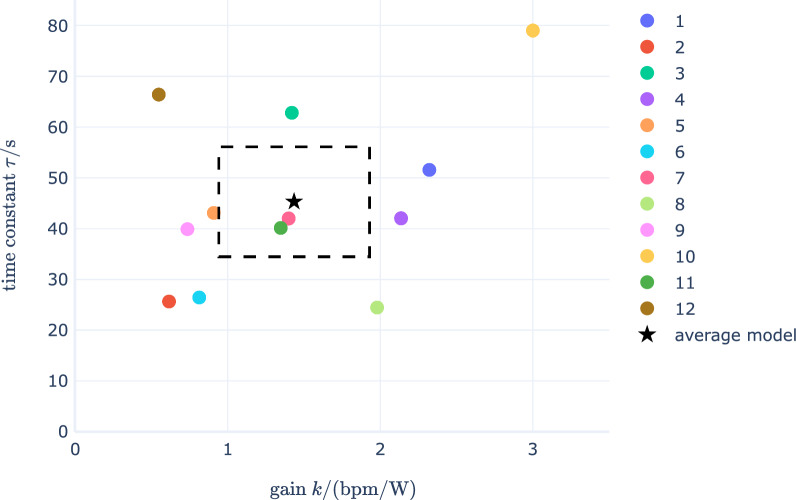
Methods: This feasibility study was designed as a case series with 12 patients ( ) with no restriction on the time post-stroke or on the degree of post-stroke impairment severity. A robotics-assisted tilt table was augmented with force sensors, a work rate estimation algorithm, and a biofeedback screen that facilitated volitional control of a target work rate. Dynamic models of HR response to changes in target work rate were estimated in system identification tests; nominal models were used to calculate the parameters of feedback controllers designed to give a specified closed-loop bandwidth; and the accuracy of HR control was assessed quantitatively in feedback control tests.
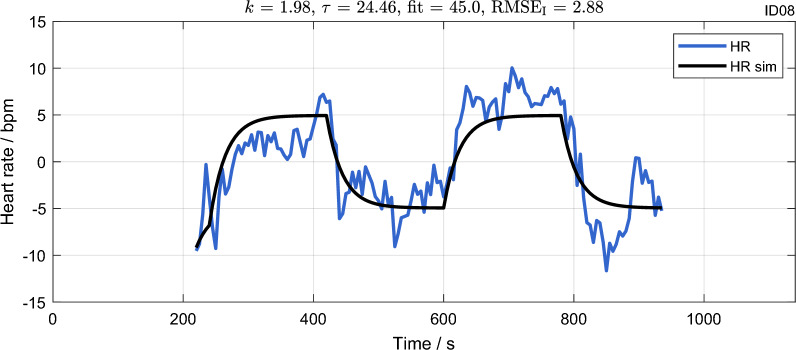
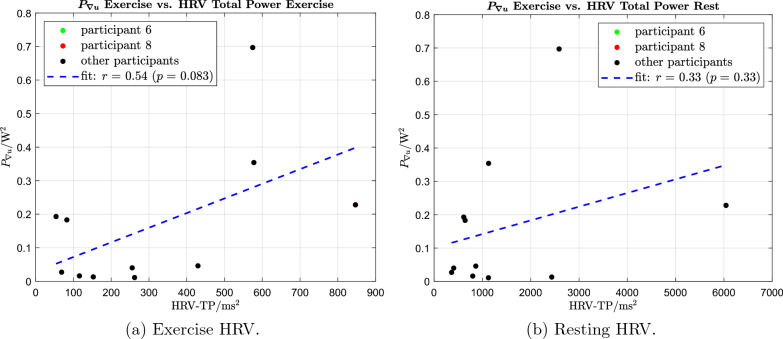
Results: Feedback control tests were successfully conducted in all 12 patients. Dynamic models of heart rate response to imposed work rate were estimated with a mean root-mean-square (RMS) model error of 2.16 beats per minute (bpm), while highly accurate feedback control of heart rate was achieved with a mean RMS tracking error (RMSE) of 2.00 bpm. Control accuracy, i.e. RMSE, was found to be strongly correlated with the magnitude of heart rate variability (HRV): patients with a low magnitude of HRV had low RMSE, i.e. more accurate HR control performance, and vice versa.
Conclusions: Feedback control of heart rate during robotics-assisted tilt table exercise was found to be feasible. Future work should investigate robustness aspects of the feedback control system. Modifications to the exercise modality, or alternative modalities, should be explored that allow higher levels of work rate and heart rate intensity to be achieved.
Keywords: Feedback control; Heart rate control; Heart rate dynamics; Neurorehabilitation; Rehabilitation robotics; Stroke.
© 2024. The Author(s).
Conflict of interest statement
The authors declare that they have no competing interests.
Figures







References
-
- Kim MJ, Farrell J. Orthostatic hypotension: a practical approach. Am Fam Phys. 2022;105(1):39–49. - PubMed
-
- Bichsel L, Sommer M, Hunt KJ. Entwicklung eines Biofeedback-Systems zur Regelung der Leistung, Herzrate und Sauerstoffaufnahme für robotische Kipptisch-Therapie. Automatisierungstechnik. 2011;59(10):622–8 (In German). 10.1524/auto.2011.0953 - DOI
-
- Saengsuwan J, Huber C, Schreiber J, Schuster-Amft C, Nef T, Hunt KJ. Feasibility of cardiopulmonary exercise testing using a robotics-assisted tilt table in dependent-ambulatory stroke patients. J Neuroeng Rehabil. 2015;12:88. 10.1186/s12984-015-0078-5. 10.1186/s12984-015-0078-5 - DOI - PMC - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
