

Teleoperation and Contact Detection of a Waterjet-Actuated Soft Continuum Manipulator for Low-Cost Gastroscopy
- PMID: 39156224
- PMCID: PMC11328976
- DOI: 10.1109/lra.2020.3013900
Teleoperation and Contact Detection of a Waterjet-Actuated Soft Continuum Manipulator for Low-Cost Gastroscopy
Abstract
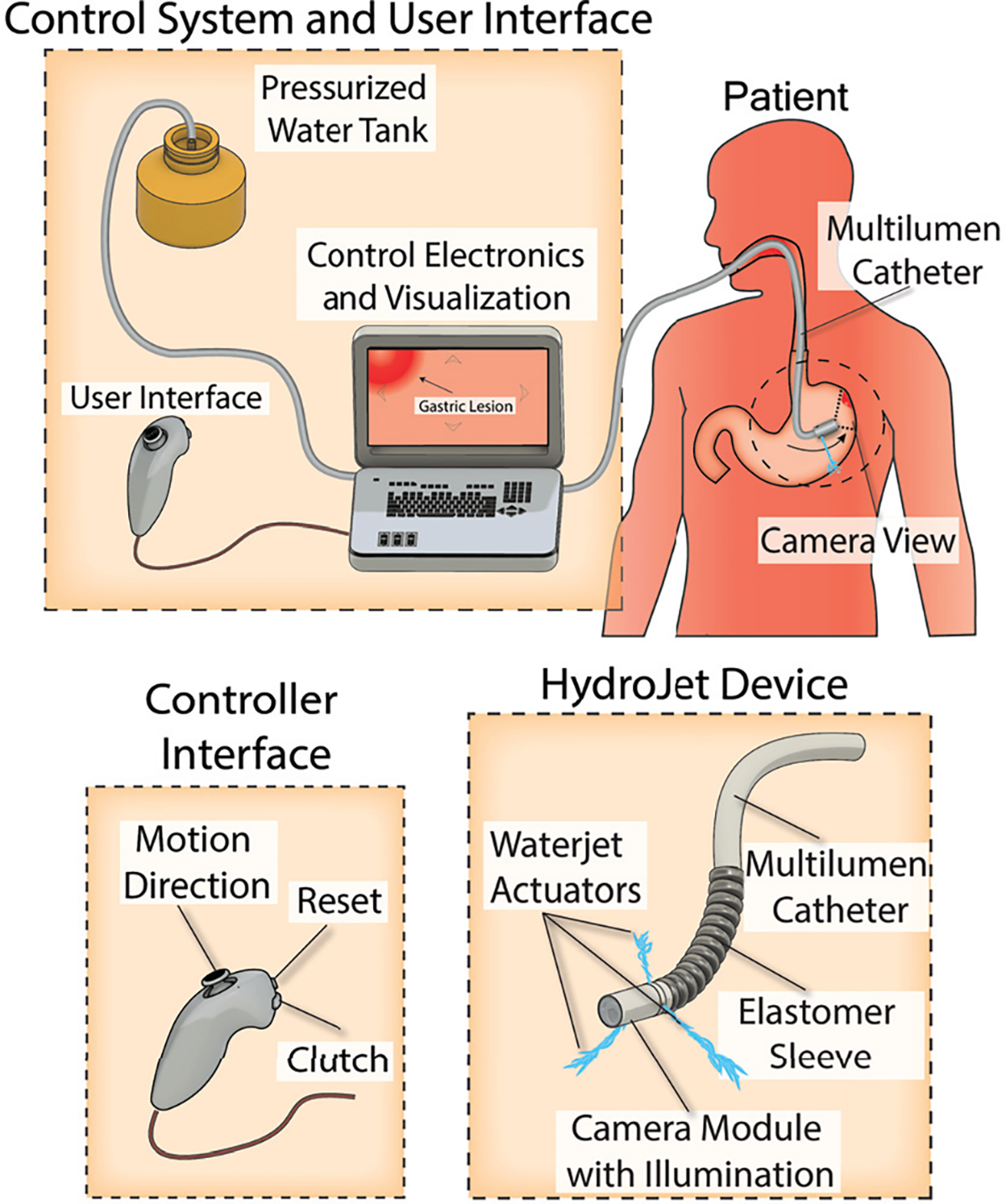
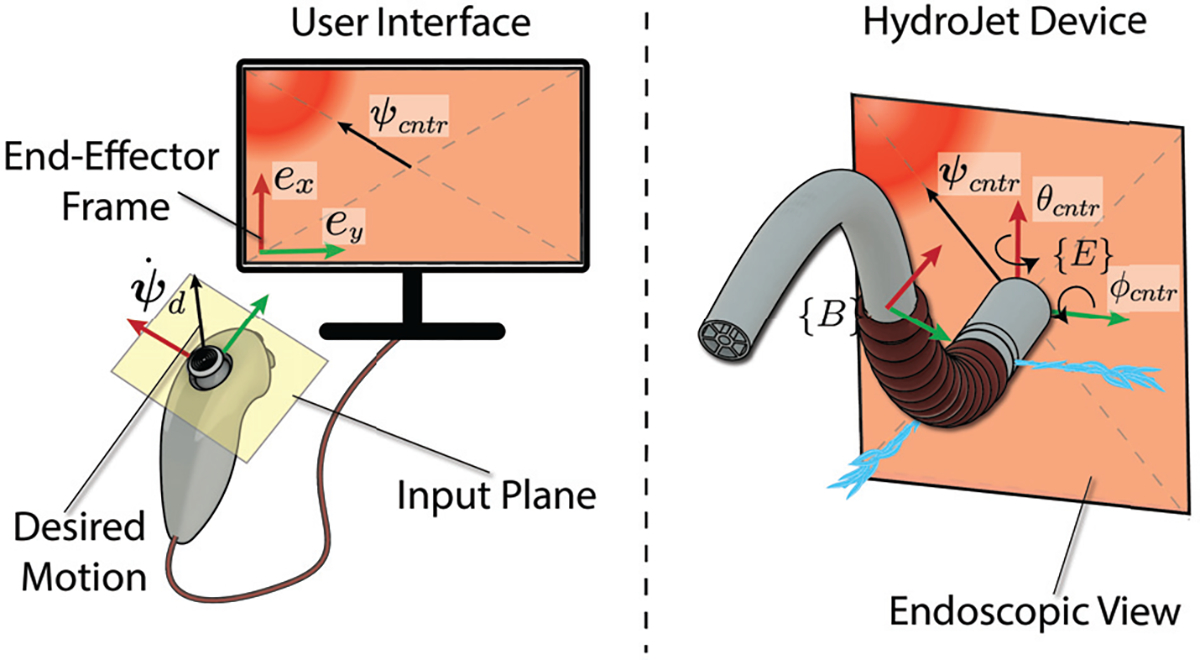
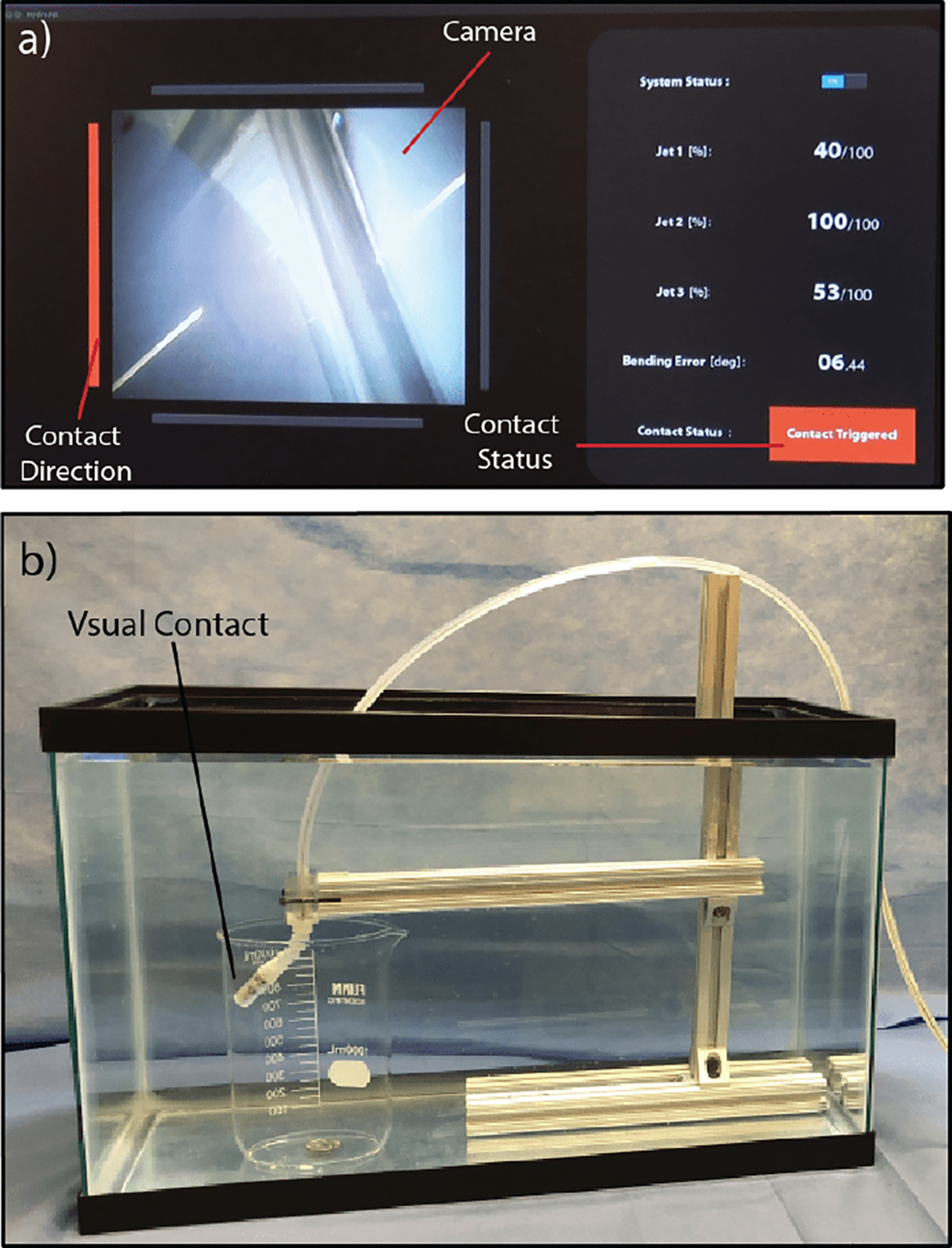
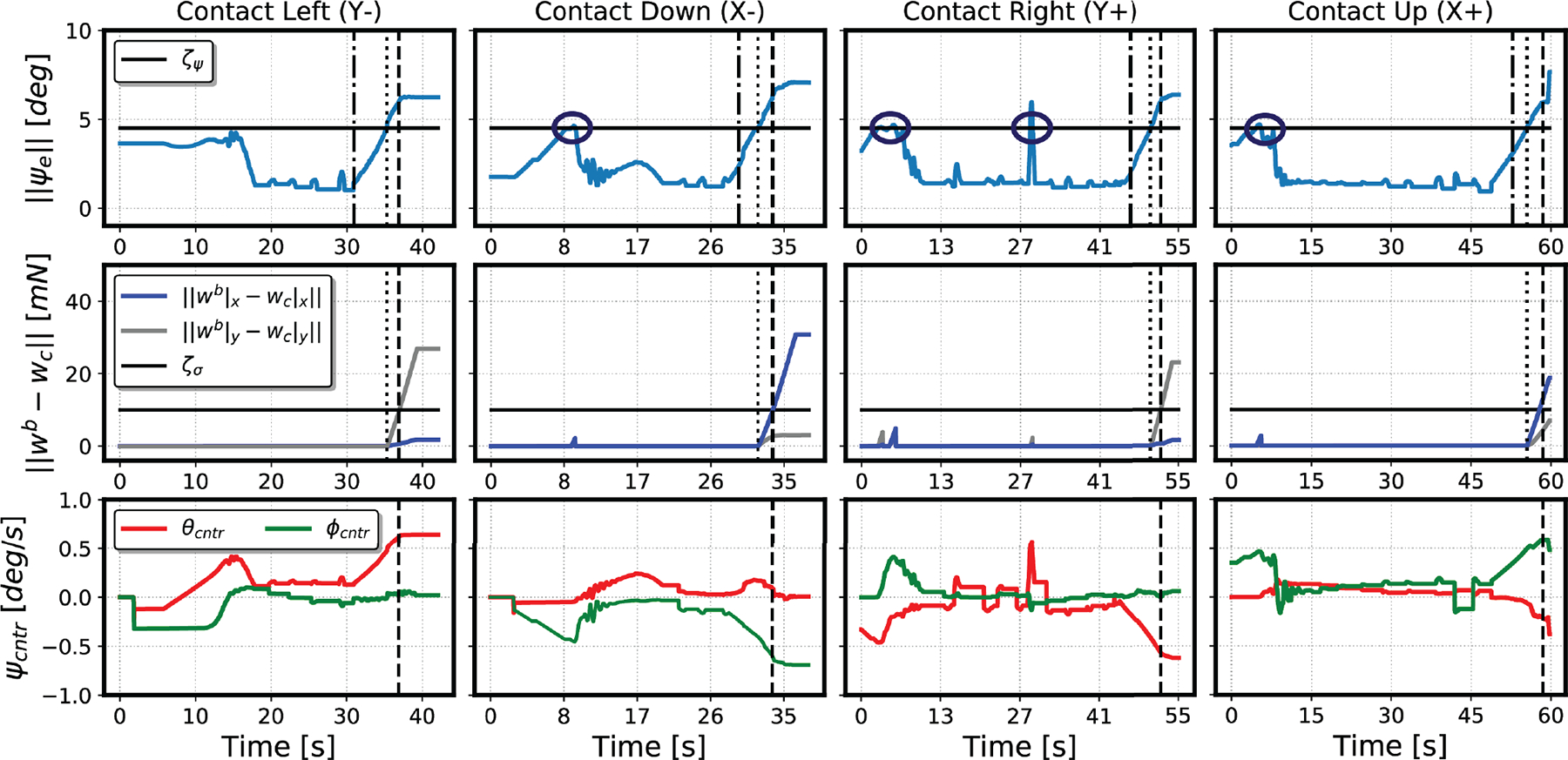
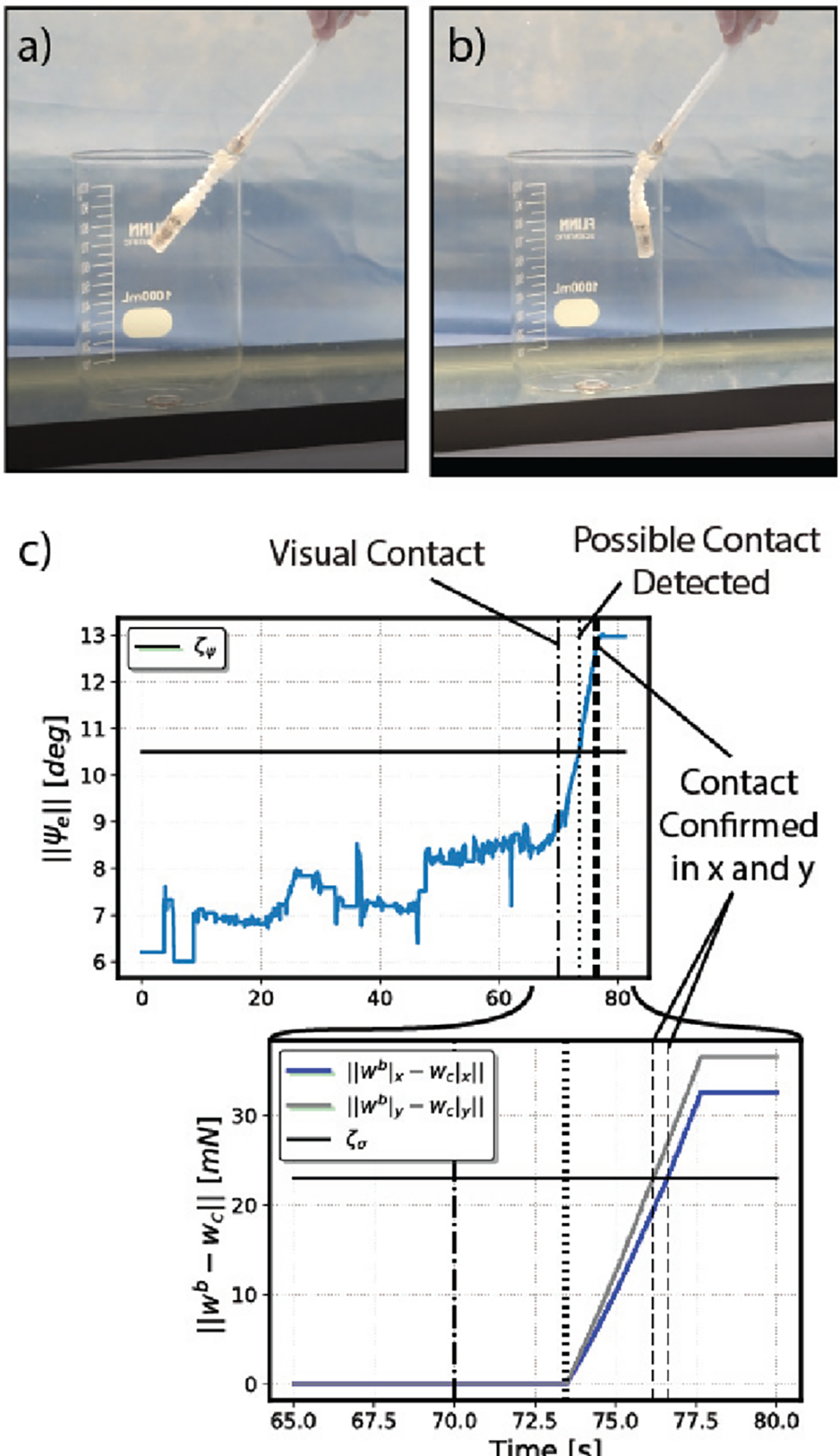
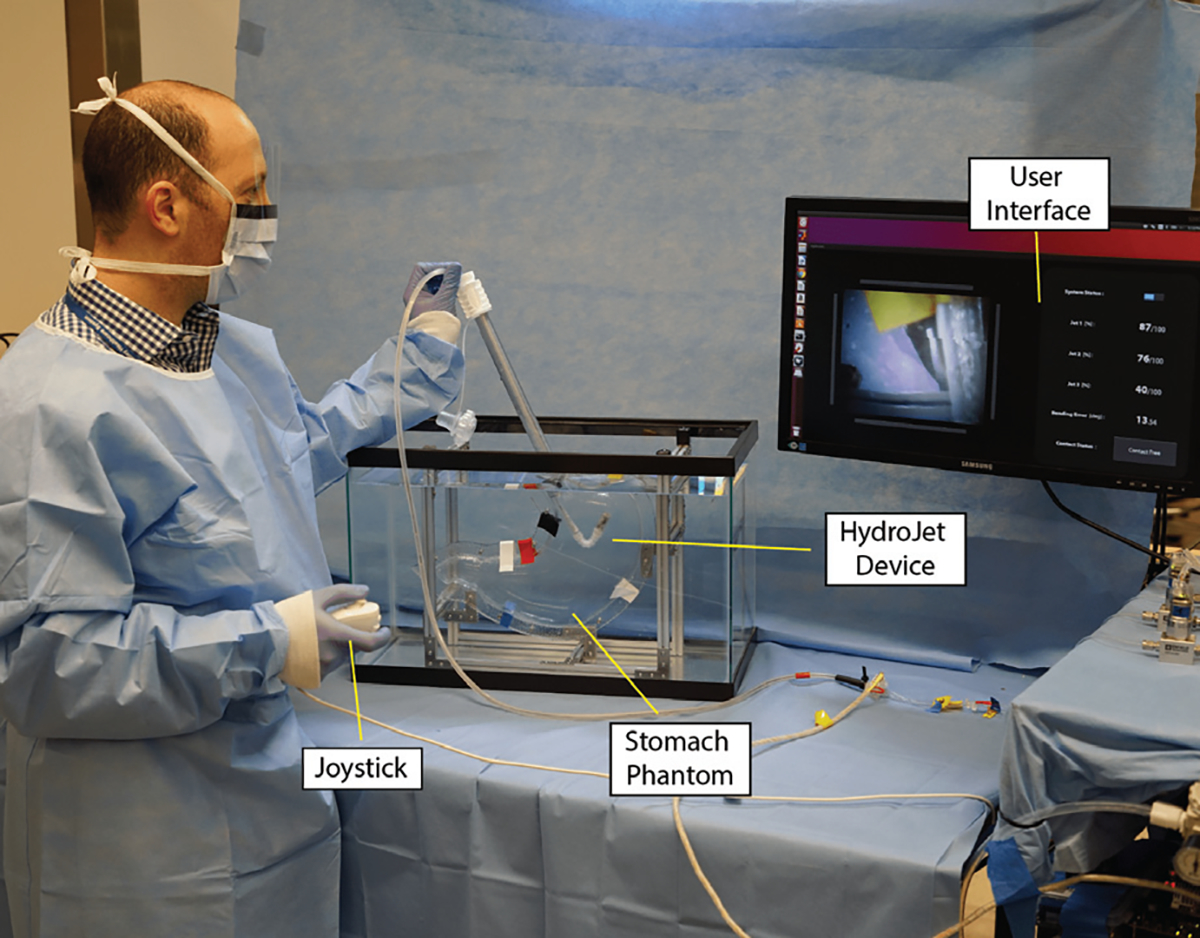
Gastric cancer is the third leading cause of cancer deaths worldwide, with most new cases occurring in low and middle income countries, where access to screening programs is hindered by the high cost of conventional endoscopy. The waterjet-actuated HydroJet endoscopic platform was developed as a low-cost, disposable alternative for inspection of the gastric cavity in low-resource settings. In this work, we present a teleoperation scheme and contact detection algorithm that work together to enable intuitive teleoperation of the HydroJet within the confined space of the stomach. Using a geometrically accurate stomach model and realistic anatomical inspection targets, we demonstrate that, using these methods, a novice user can complete a gastroscopy in approximately the same amount of time with the HydroJet as with a conventional endoscope.
Keywords: Contact Modeling; Medical Robots and Systems; Telerobotics and Teleoperation.
Figures
References
-
- Ferlay J, Shin H-R, Bray F, Forman D, Mathers C, and Parkin DM, “Estimates of worldwide burden of cancer in 2008: Globocan 2008,” International journal of cancer, vol. 127, no. 12, pp. 2893–2917, 2010. - PubMed
-
- De Martel C, Ferlay J, Franceschi S, Vignat J, Bray F, Forman D, and Plummer M, “Global burden of cancers attributable to infections in 2008: a review and synthetic analysis,” The lancet oncology, vol. 13, no. 6, pp. 607–615, 2012. - PubMed
-
- Lee K-J, Inoue M, Otani T, Iwasaki M, Sasazuki S, and Tsugane S, “Gastric cancer screening and subsequent risk of gastric cancer: a largescale population-based cohort study, with a 13-year follow-up in japan,” International journal of cancer, vol. 118, no. 9, pp. 2315–2321, 2006. - PubMed
-
- Ranzani T, Gerboni G, Cianchetti M, and Menciassi A, “A bioinspired soft manipulator for minimally invasive surgery,” Bioinspiration & biomimetics, vol. 10, no. 3, p. 035008, 2015. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources