

Development of Precision Controllable Magnetic Field-Assisted Platform for Micro Electrical Machining
- PMID: 39203653
- PMCID: PMC11356375
- DOI: 10.3390/mi15081002
Development of Precision Controllable Magnetic Field-Assisted Platform for Micro Electrical Machining
Abstract
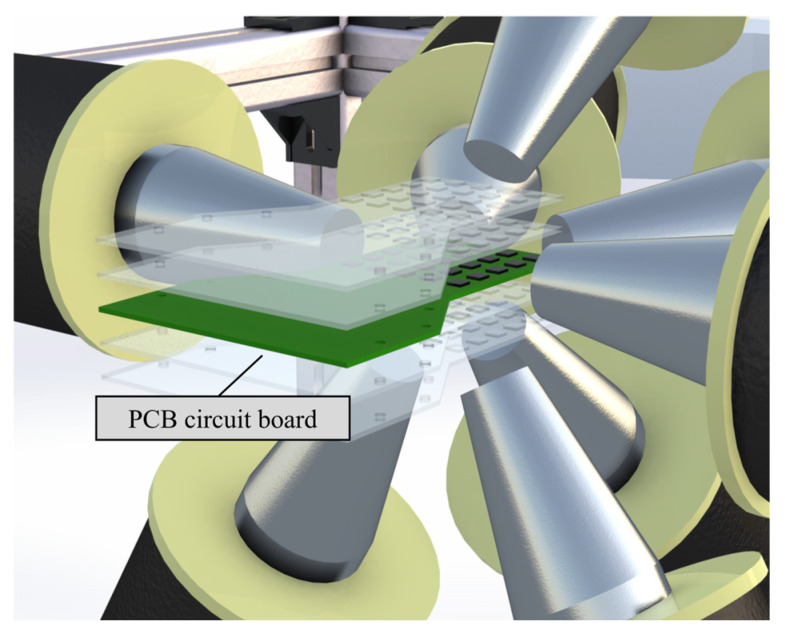
In order to introduce the magnetic field into micro electrical machining technology to explore the influence of magnetic field on micro electrical machining, the development of a precision controllable magnetic field-assisted platform is particularly important. This platform needs to precisely control the spatial magnetic field. This study first completes the hardware design and construction of the magnetic field generation device, using electromagnetic coils with soft iron cores as the sources of the magnetic field. Mathematical models of the magnetic field are established and calibrated. Since the magnetic dipole model cannot effectively describe the magnetic field generated by the electromagnetic coil, this study adopts a more precise description method: the spherical harmonic function expansion model and the magnetic multipole superposition model. The calibration of the magnetic field model is based on actual excitation magnetic field data, so a magnetic field sampling device is designed to obtain the excitation magnetic field of the workspace. The model is calibrated based on a combination of the theoretical model and magnetic field data, and the performance of the constructed setup is analyzed. Finally, a magnetic field-assisted platform has been developed which can generate magnetic fields in any direction within the workspace with intensities ranging from 0 to 0.2 T. Its magnetic field model arrives at an error percentage of 2.986%, a variance of 0.9977, and a root mean square error (RMSE) of 0.71 mT, achieving precise control of the magnetic field in the workspace.
Keywords: electromagnetic coil; magnetic field; magnetic multipole superposition; micro electrical machining; spherical harmonic function.
Conflict of interest statement
The authors declare no conflict of interest. The founding sponsors had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
Figures









References
-
- Pittiglio G., Barducci L., Martin J.W., Norton J.C., Avizzano C.A., Obstein K.L., Valdastri P. Magnetic Levitation for Soft-Tethered Capsule Colonoscopy Actuated with a Single Permanent Magnet: A Dynamic Control Approach. IEEE Robot. Autom. Lett. 2019;4:1224–1231. doi: 10.1109/LRA.2019.2894907. - DOI - PMC - PubMed
-
- Ryan P., Diller E. Magnetic Actuation for Full Dexterity Microrobotic Control Using Rotating Permanent Magnets. IEEE Trans. Robot. 2017;33:1398–1409. doi: 10.1109/TRO.2017.2719687. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
