

Wearable bio-adhesive metal detector array (BioMDA) for spinal implants
- PMID: 39242511
- PMCID: PMC11379874
- DOI: 10.1038/s41467-024-51987-2
Wearable bio-adhesive metal detector array (BioMDA) for spinal implants
Abstract
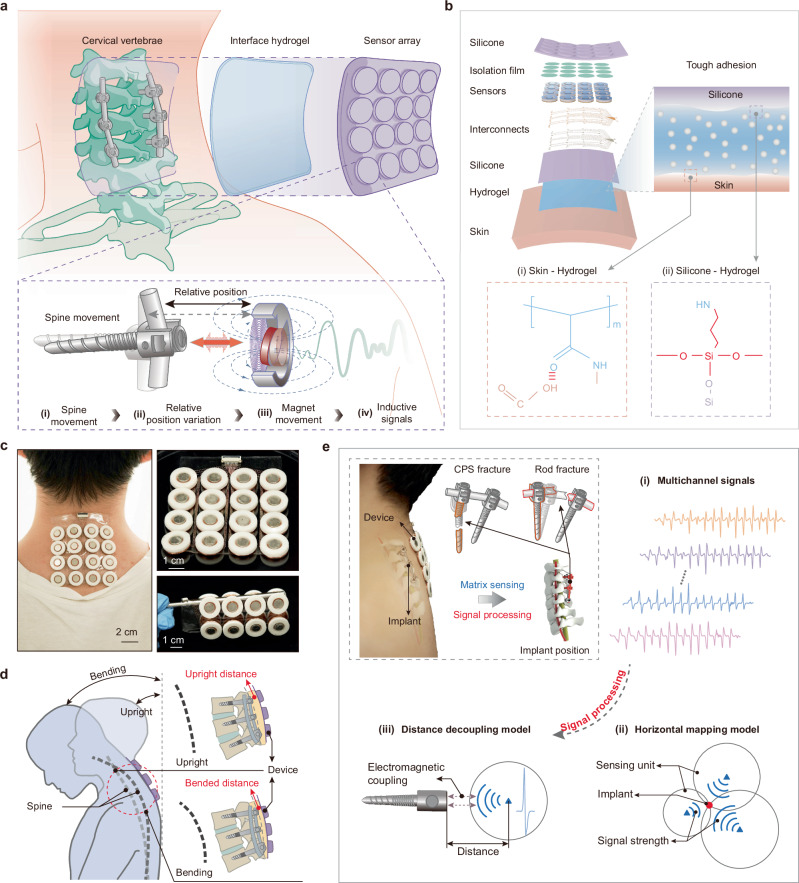
Dynamic tracking of spinal instrumentation could facilitate real-time evaluation of hardware integrity and in so doing alert patients/clinicians of potential failure(s). Critically, no method yet exists to continually monitor the integrity of spinal hardware and by proxy the process of spinal arthrodesis; as such hardware failures are often not appreciated until clinical symptoms manifest. Accordingly, herein, we report on the development and engineering of a bio-adhesive metal detector array (BioMDA), a potential wearable solution for real-time, non-invasive positional analyses of osseous implants within the spine. The electromagnetic coupling mechanism and intimate interfacial adhesion enable the precise sensing of the metallic implants position without the use of radiation. The customized decoupling models developed facilitate the precise determination of the horizontal and vertical positions of the implants with incredible levels of accuracy (e.g., <0.5 mm). These data support the potential use of BioMDA in real-time/dynamic postoperative monitoring of spinal implants.
© 2024. The Author(s).
Conflict of interest statement
J.D.B. has an equity position in Treovir Inc. and UpFront Diagnostics. J.D.B. is also a co-founder of Centile Bioscience and on the NeuroX1 scientific advisory board. The authors declare filing of a provisional patent application encompassing the work described.
Figures
Similar articles
-
Interventions for interpersonal communication about end of life care between health practitioners and affected people.Cochrane Database Syst Rev. 2022 Jul 8;7(7):CD013116. doi: 10.1002/14651858.CD013116.pub2. Cochrane Database Syst Rev. 2022. PMID: 35802350 Free PMC article.
-
Factors Affecting the Quality of Person-Generated Wearable Device Data and Associated Challenges: Rapid Systematic Review.JMIR Mhealth Uhealth. 2021 Mar 19;9(3):e20738. doi: 10.2196/20738. JMIR Mhealth Uhealth. 2021. PMID: 33739294 Free PMC article.
-
Signs and symptoms to determine if a patient presenting in primary care or hospital outpatient settings has COVID-19.Cochrane Database Syst Rev. 2022 May 20;5(5):CD013665. doi: 10.1002/14651858.CD013665.pub3. Cochrane Database Syst Rev. 2022. PMID: 35593186 Free PMC article.
-
Tissue adhesives for traumatic lacerations in children and adults.Cochrane Database Syst Rev. 2002;2002(3):CD003326. doi: 10.1002/14651858.CD003326. Cochrane Database Syst Rev. 2002. PMID: 12137689 Free PMC article.
-
Interventions for replacing missing teeth: different types of dental implants.Cochrane Database Syst Rev. 2005 Jan 25;(1):CD003815. doi: 10.1002/14651858.CD003815.pub2. Cochrane Database Syst Rev. 2005. Update in: Cochrane Database Syst Rev. 2007 Oct 17;(4):CD003815. doi: 10.1002/14651858.CD003815.pub3. PMID: 15674915 Updated.
Cited by
-
A skin-interfaced three-dimensional closed-loop sensing and therapeutic electronic wound bandage.Nat Commun. 2025 Jul 1;16(1):5782. doi: 10.1038/s41467-025-61261-8. Nat Commun. 2025. PMID: 40593825 Free PMC article.
References
-
- Fujimoto, T. et al. Pedicle screw diameter selection for safe insertion in the thoracic spine. Eur. J. Orthop. Surg. Traumatol.22, 351–356 (2012).10.1007/s00590-011-0846-2 - DOI
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
