

Interpretable machine learning comprehensive human gait deterioration analysis
- PMID: 39247901
- PMCID: PMC11377268
- DOI: 10.3389/fninf.2024.1451529
Interpretable machine learning comprehensive human gait deterioration analysis
Abstract
Introduction: Gait analysis, an expanding research area, employs non-invasive sensors and machine learning techniques for a range of applications. In this study, we investigate the impact of cognitive decline conditions on gait performance, drawing connections between gait deterioration in Parkinson's Disease (PD) and healthy individuals dual tasking.
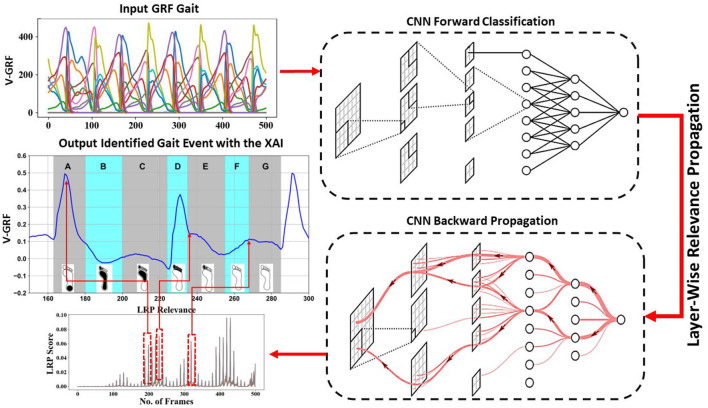
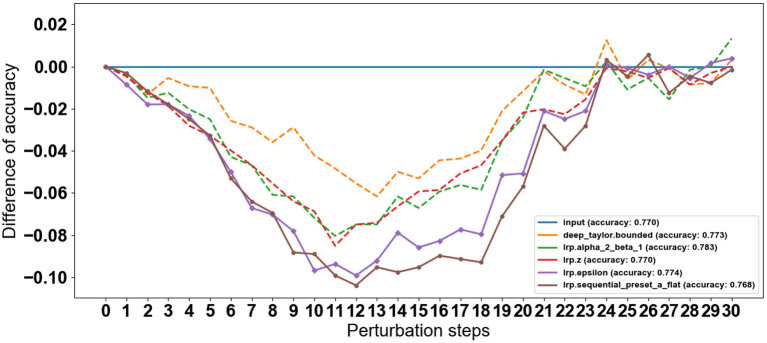
Methods: We employ Explainable Artificial Intelligence (XAI) specifically Layer-Wise Relevance Propagation (LRP), in conjunction with Convolutional Neural Networks (CNN) to interpret the intricate patterns in gait dynamics influenced by cognitive loads.
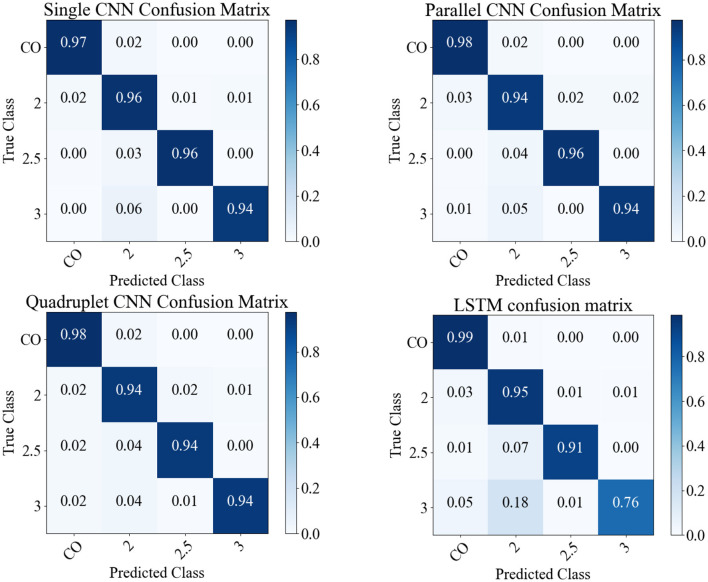
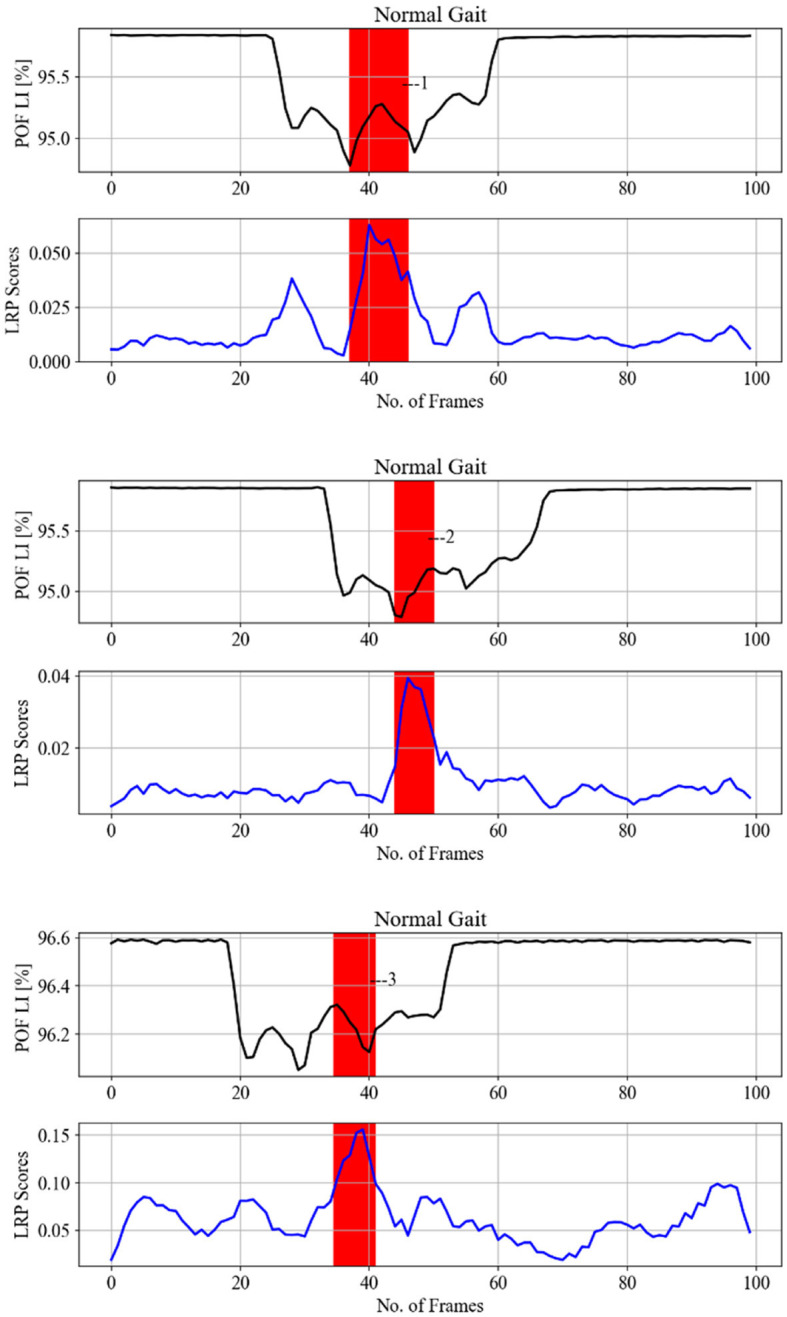
Results: We achieved classification accuracies of 98% F1 scores for PD dataset and 95.5% F1 scores for the combined PD dataset. Furthermore, we explore the significance of cognitive load in healthy gait analysis, resulting in robust classification accuracies of 90% ± 10% F1 scores for subject cognitive load verification. Our findings reveal significant alterations in gait parameters under cognitive decline conditions, highlighting the distinctive patterns associated with PD-related gait impairment and those induced by multitasking in healthy subjects. Through advanced XAI techniques (LRP), we decipher the underlying features contributing to gait changes, providing insights into specific aspects affected by cognitive decline.
Discussion: Our study establishes a novel perspective on gait analysis, demonstrating the applicability of XAI in elucidating the shared characteristics of gait disturbances in PD and dual-task scenarios in healthy individuals. The interpretability offered by XAI enhances our ability to discern subtle variations in gait patterns, contributing to a more nuanced comprehension of the factors influencing gait dynamics in PD and dual-task conditions, emphasizing the role of XAI in unraveling the intricacies of gait control.
Keywords: Parkinson's disease; deep convolutional neural networks (CNN); deep learning; gait; ground reaction forces (GRF); interpretable neural networks; perturbation.
Copyright © 2024 Alharthi.
Conflict of interest statement
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures










References
-
- Abdulhay E., Arunkumar N., Narasimhan K., Vellaiappan E. (2018). Gait and tremor investigation using machine learning techniques for the diagnosis of Parkinson disease. Future Gener. Comput. Syst. 83, 366–373. 10.1016/j.future.2018.02.009 - DOI
-
- Adebayo J., Gilmer J., Muelly M., Goodfellow I., Hardt M., Kim B., et al. (2018). “Sanity checks for saliency maps,” in Proc. Adv Neural Information Processing Systems (NeurIPS) (San Diego, CA: ), 9505–9515.
-
- Alber M., Lapuschkin S., Seegerer P., Hägele M., Schütt K. T., Montavon G., et al. (2018). iNNvestigate Neural Networks. Available at: https://github.com/albermax/innvestigate (accessed Jun 19, 2024).
-
- Alharthi A. S., Yunas S. U., Ozanyan K. B. (2019). Deep learning for monitoring of human gait: a review. IEEE Sens. J. 19, 9575–9591. 10.1109/JSEN.2019.2928777 - DOI
-
- Alotaibi M., Mahmood A. (2015). “Improved gait recognition based on specialized deep convolutional neural network,” in 2015 IEEE Applied Imagery Pattern Recognition Workshop (AIPR) (Washington, DC: IEEE; ). 10.1109/AIPR.2015.7444550 - DOI
LinkOut - more resources
Full Text Sources
Miscellaneous