

An improve nonlinear robust control approach for robotic manipulators with PSO-based global optimization strategy
- PMID: 39271908
- PMCID: PMC11399248
- DOI: 10.1038/s41598-024-72156-x
An improve nonlinear robust control approach for robotic manipulators with PSO-based global optimization strategy
Abstract
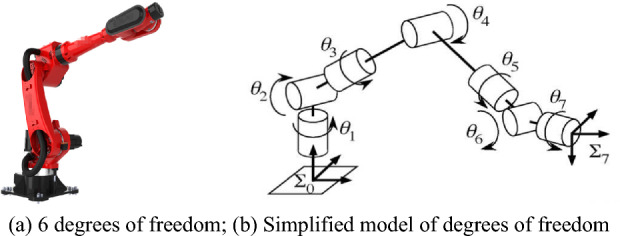
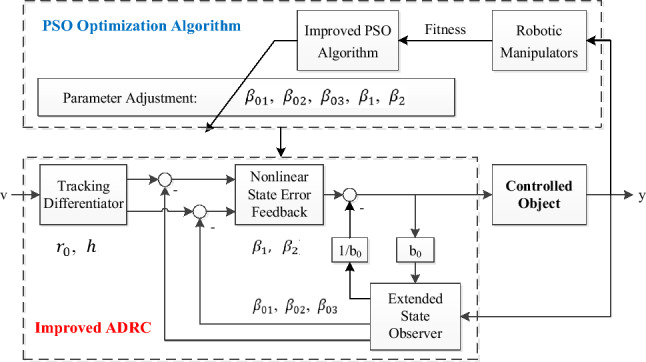
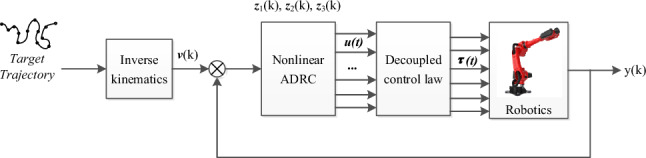
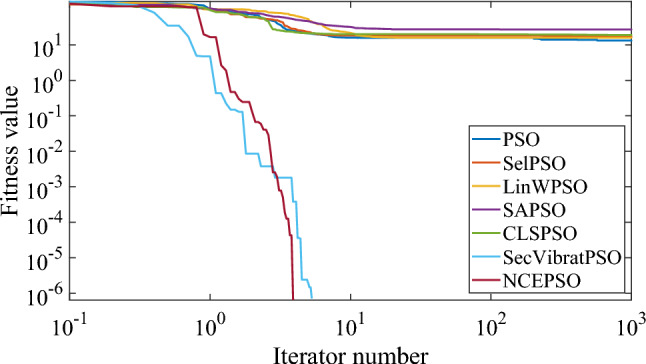
During the trajectory tracking of robotic manipulators, many factors including dead zones, saturation, and uncertain dynamics, greatly increase the modeling and control difficulty. Aiming for this issue, a nonlinear active disturbance rejection control (NADRC)-based control strategy is proposed for robotic manipulators. In this controller, an extended state observer is introduced on basis of the dynamic model, to observe the extend state of model uncertainties and external disturbances. Then, in combination with the nonlinear feedback control structure, the robust trajectory tracking of robotic manipulators is achieved. Furthermore, to optimize the key parameters of the controller, an improved particle swarm optimization algorithm (IPSO) is designed using chaos theory, which improves the tracking accuracy of the proposed NDRC strategy effectively. Finally, using comparative studies, the effectiveness of the proposed control strategy is demonstrated by comparing with several commonly used controllers.
Keywords: Active disturbance rejection controller; Nonlinear control; Nonlinear dynamics; Particle swarm optimization; Robotic manipulator.
© 2024. The Author(s).
Conflict of interest statement
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Figures






References
-
- Wei, S. & Cong, S. Nonlinear computed torque control for a high-speed planar parallel manipulator. Mechatronics19, 987–992 (2009).10.1016/j.mechatronics.2009.04.002 - DOI
-
- Pan, C. et al. A model-free output feedback control approach for the stabilization of underactuated TORA system with input saturation. Actuators11(3), 97 (2022).10.3390/act11030097 - DOI
-
- Lewis, F., Abdallah, C. & Dawson, D. Control of robot manipulators (Macmillan, 1993).
-
- Wang, Y. et al. LESO-based nonlinear continuous robust stabilization control of underactuated TORA systems. Actuators11(8), 220 (2022).10.3390/act11080220 - DOI
-
- Xu, D., Xu, B., Hu, T. & Yin, L. Rules-reduced fuzzy neural network-based learning control for multiple constraints robots using online identification and compensation methods. Inf. Sci.679, 121060 (2024).10.1016/j.ins.2024.121060 - DOI
LinkOut - more resources
Full Text Sources
