

Human perceptions of social robot deception behaviors: an exploratory analysis
- PMID: 39301050
- PMCID: PMC11411098
- DOI: 10.3389/frobt.2024.1409712
Human perceptions of social robot deception behaviors: an exploratory analysis
Abstract
Introduction: Robots are being introduced into increasingly social environments. As these robots become more ingrained in social spaces, they will have to abide by the social norms that guide human interactions. At times, however, robots will violate norms and perhaps even deceive their human interaction partners. This study provides some of the first evidence for how people perceive and evaluate robot deception, especially three types of deception behaviors theorized in the technology ethics literature: External state deception (cues that intentionally misrepresent or omit details from the external world: e.g., lying), Hidden state deception (cues designed to conceal or obscure the presence of a capacity or internal state the robot possesses), and Superficial state deception (cues that suggest a robot has some capacity or internal state that it lacks).
Methods: Participants (N = 498) were assigned to read one of three vignettes, each corresponding to one of the deceptive behavior types. Participants provided responses to qualitative and quantitative measures, which examined to what degree people approved of the behaviors, perceived them to be deceptive, found them to be justified, and believed that other agents were involved in the robots' deceptive behavior.
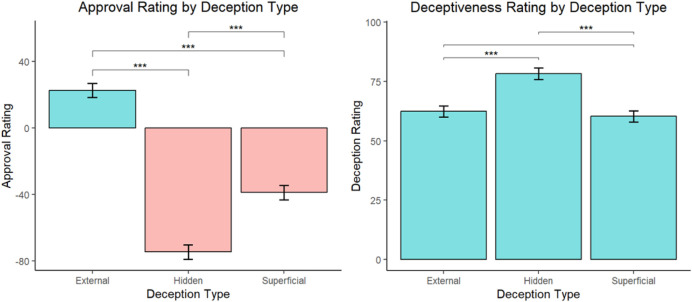
Results: Participants rated hidden state deception as the most deceptive and approved of it the least among the three deception types. They considered external state and superficial state deception behaviors to be comparably deceptive; but while external state deception was generally approved, superficial state deception was not. Participants in the hidden state condition often implicated agents other than the robot in the deception.
Conclusion: This study provides some of the first evidence for how people perceive and evaluate the deceptiveness of robot deception behavior types. This study found that people people distinguish among the three types of deception behaviors and see them as differently deceptive and approve of them differently. They also see at least the hidden state deception as stemming more from the designers than the robot itself.
Keywords: deception; deceptive anthropomorphism; human-robot interaction; justifications; robots.
Copyright © 2024 Rosero, Dula, Kelly, Malle and Phillips.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures


References
-
- Arkin R. C. (2018). Ethics of robotic deception [opinion]. IEEE Technol. Soc. Mag. 37, 18–19. 10.1109/mts.2018.2857638 - DOI
-
- Benjamini Y., Hochberg Y. (1997). Multiple hypotheses testing with weights. Scand. J. Statistics 24, 407–418. 10.1111/1467-9469.00072 - DOI
-
- Bennett C. C., Weiss B. (2022). “Purposeful failures as a form of culturally-appropriate intelligent disobedience during human-robot social interaction,” in International Conference on Autonomous Agents and Multiagent Systems, Germany, 6 – 10 MAY 2024 (Springer; ), 84–90.
-
- Bicchieri C. (2006). The grammar of society: the nature and dynamics of social norms. New York, NY: Cambridge University Press.
LinkOut - more resources
Full Text Sources
Research Materials