

Towards Autonomous Retinal Microsurgery Using RGB-D Images
- PMID: 39309968
- PMCID: PMC11415253
- DOI: 10.1109/lra.2024.3368192
Towards Autonomous Retinal Microsurgery Using RGB-D Images
Abstract
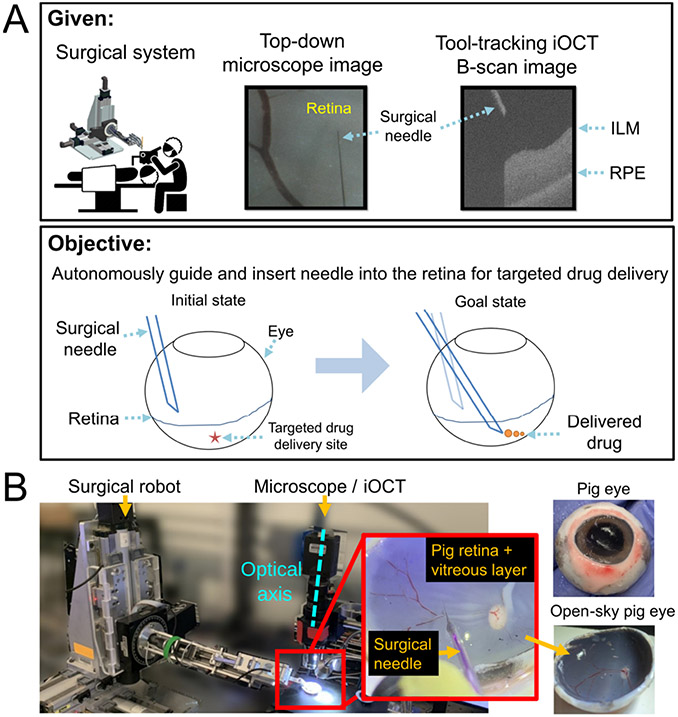
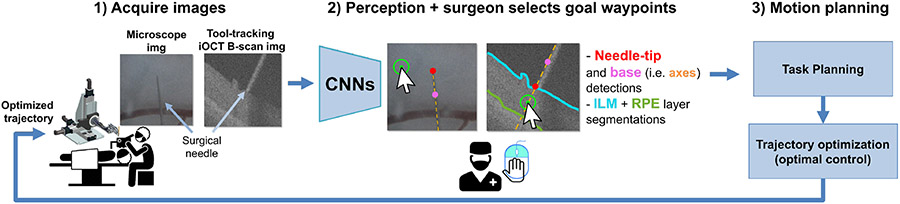
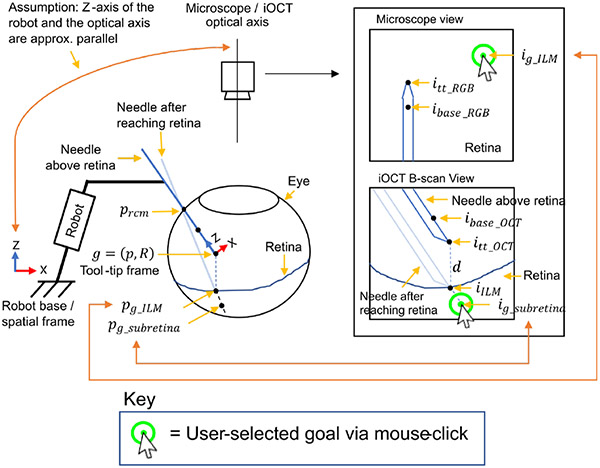
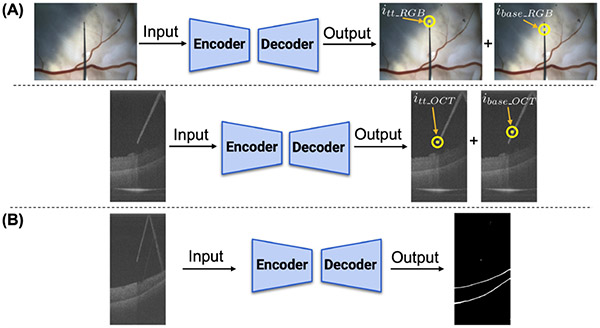
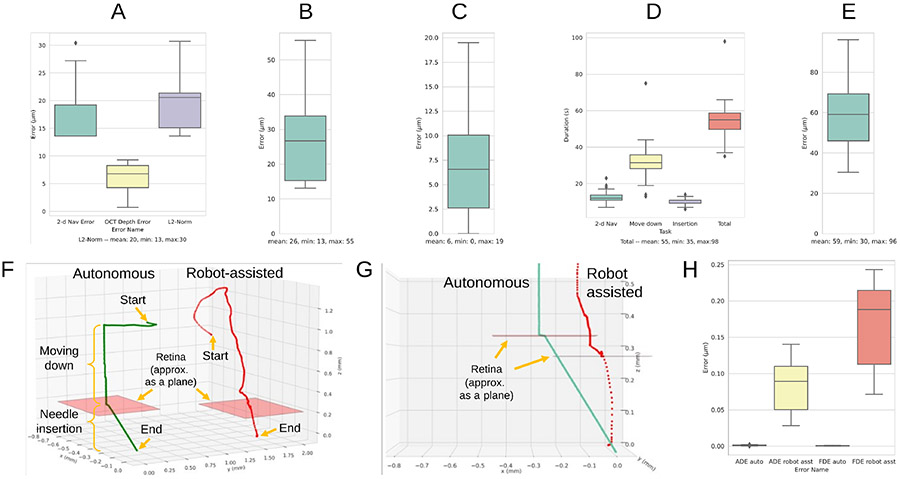
Retinal surgery is a challenging procedure requiring precise manipulation of the fragile retinal tissue, often at the scale of tens-of-micrometers. Its difficulty has motivated the development of robotic assistance platforms to enable precise motion, and more recently, novel sensors such as microscope integrated optical coherence tomography (OCT) for RGB-D view of the surgical workspace. The combination of these devices opens new possibilities for robotic automation of tasks such as subretinal injection (SI), a procedure that involves precise needle insertion into the retina for targeted drug delivery. Motivated by this opportunity, we develop a framework for autonomous needle navigation during SI. We develop a system which enables the surgeon to specify waypoint goals in the microscope and OCT views, and the system autonomously navigates the needle to the desired subretinal space in real-time. Our system integrates OCT and microscope images with convolutional neural networks (CNNs) to automatically segment the surgical tool and retinal tissue boundaries, and model predictive control that generates optimal trajectories that respect kinematic constraints to ensure patient safety. We validate our system by demonstrating 30 successful SI trials on pig eyes. Preliminary comparisons to a human operator in robot-assisted mode highlight the enhanced safety and performance of our system.
Keywords: Computer Vision for Medical Robotics; Medical Robots and Systems; Vision-Based Navigation.
Figures
Similar articles
-
Autonomous Needle Navigation in Subretinal Injections via iOCT.IEEE Robot Autom Lett. 2024 May;9(5):4154-4161. doi: 10.1109/lra.2024.3375710. Epub 2024 Mar 11. IEEE Robot Autom Lett. 2024. PMID: 38550718 Free PMC article.
-
Robotic Navigation Autonomy for Subretinal Injection via Intelligent Real-Time Virtual iOCT Volume Slicing.IEEE Int Conf Robot Autom. 2023 May-Jun;2023:4724-4731. doi: 10.1109/icra48891.2023.10160372. Epub 2023 Jul 4. IEEE Int Conf Robot Autom. 2023. PMID: 38125032 Free PMC article.
-
CNN-based CP-OCT sensor integrated with a subretinal injector for retinal boundary tracking and injection guidance.J Biomed Opt. 2021 Jun;26(6):068001. doi: 10.1117/1.JBO.26.6.068001. J Biomed Opt. 2021. PMID: 34196137 Free PMC article.
-
Robotics in Vitreo-Retinal Surgery.Semin Ophthalmol. 2022 Oct-Nov;37(7-8):795-800. doi: 10.1080/08820538.2022.2075705. Epub 2022 May 16. Semin Ophthalmol. 2022. PMID: 35576476 Review.
-
[Development of a planned and monitoring robotic assistance and automation for application in orthopedics and trauma surgery].Chirurgie (Heidelb). 2023 Apr;94(4):312-317. doi: 10.1007/s00104-023-01844-7. Epub 2023 Feb 20. Chirurgie (Heidelb). 2023. PMID: 36808497 Review. German.
Cited by
-
Sharper vision, steady hands: can robots improve subretinal drug delivery? Systematic review.J Robot Surg. 2024 May 31;18(1):235. doi: 10.1007/s11701-024-01991-x. J Robot Surg. 2024. PMID: 38819533 Free PMC article.
-
Autonomous Needle Navigation in Subretinal Injections via iOCT.IEEE Robot Autom Lett. 2024 May;9(5):4154-4161. doi: 10.1109/lra.2024.3375710. Epub 2024 Mar 11. IEEE Robot Autom Lett. 2024. PMID: 38550718 Free PMC article.
References
-
- Berger W, Kloeckener-Gruissem B, and Neidhardt J, “The molecular basis of human retinal and vitreoretinal diseases,” Progress in Retinal and Eye Research, vol. 29, no. 5, pp. 335–375, 2010. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S135094621000025X - PubMed
-
- Singh S and Riviere C, “Physiological tremor amplitude during retinal microsurgery,” in Proceedings of the IEEE 28th Annual Northeast Bioengineering Conference (IEEE Cat. No.02CH37342), 2002, pp. 171–172.
-
- Xue K, Edwards T, Meenink H, Beelen M, Naus G, Simunovic M, De Smet M, and MacLaren R, Robot-Assisted Retinal Surgery: Over-coming Human Limitations, 05 2019, pp. 109–114.
-
- Cehajic-Kapetanovic J, Xue K, Edwards TL, Meenink TC, Beelen MJ, Naus GJ, de Smet MD, and MacLaren RE, “First-in-human robot-assisted subretinal drug delivery under local anesthesia,” Am. J. Ophthalmol, vol. 237, pp. 104–113, May 2022. - PubMed
-
- Mach K, Wei S, Kim JW, Martin-Gomez A, Zhang P, Kang JU, Nasseri MA, Gehlbach P, Navab N, and Iordachita I, “Oct-guided robotic subretinal needle injections: A deep learning-based registration approach,” in 2022 IEEE International Conference on Bioinformatics and Biomedicine (BIBM). IEEE, 2022, pp. 781–786. - PMC - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources