

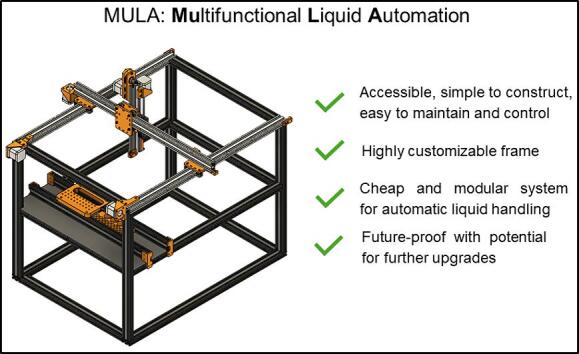
MULA, an affordable framework for multifunctional liquid automation in natural- and life sciences with a focus on hardware design, setup, modularity and validation
- PMID: 39318972
- PMCID: PMC11421249
- DOI: 10.1016/j.ohx.2024.e00581
MULA, an affordable framework for multifunctional liquid automation in natural- and life sciences with a focus on hardware design, setup, modularity and validation
Abstract
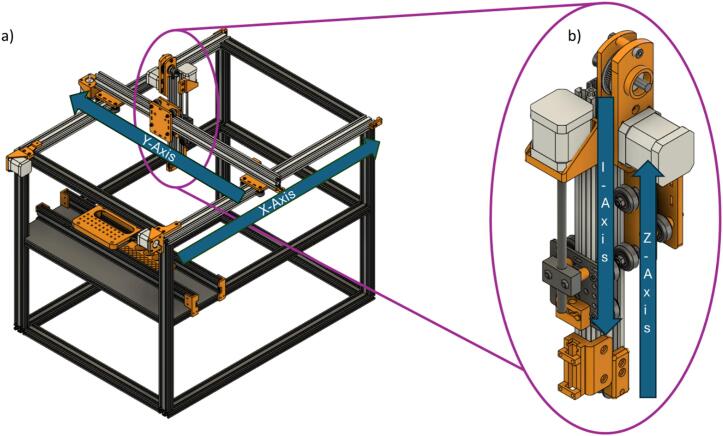
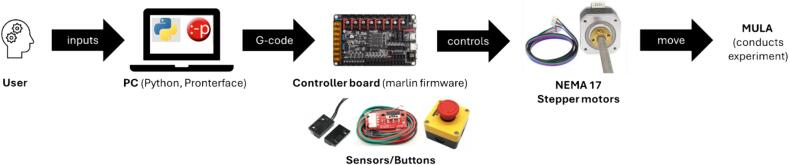
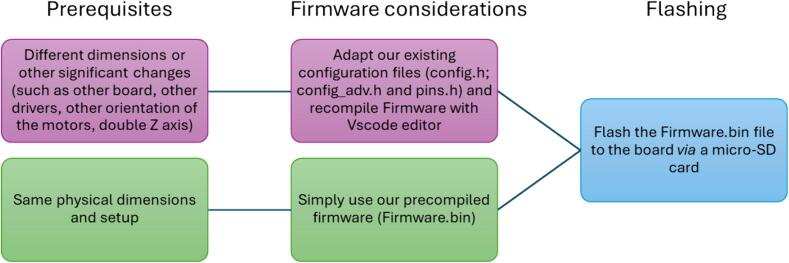
The implementation of automation has already had a considerable impact on chemical and pharmaceutical industrial laboratories. However, academic laboratories have often been more reluctant to adopt such technology due to the high cost of commercial liquid handling systems, although, in many instances, there would be a huge potential to automate repetitive tasks, resulting in elevated productivity. We present here a detailed description of the setup, validation, and utilization of a multifunctional liquid automation (MULA) system that can be used to automate various chemical and biological tasks. Considering that such a setup must be highly customizable, we also designed MULA with respect to modularity, providing detailed insight as far as possible. Including all 3D-printed parts and the used Hamilton gastight micro syringe, the total construction cost is approximately 700 €. This allows us to achieve a highly reliable and accurate system that exceeds the precision of a classical air displacement pipette while still retaining the ability to use closed vial (septa) setups. To encourage other groups to adopt this setup, detailed instructions and tips for every step of the process are provided, along with the complete CAD design of MULA and control code, which are freely available for download under the CC BY NC 3.0 license.
Keywords: 3D printing; Biology; Chemistry; Liquid handling; Micro-syringe; Pipetting.
© 2024 The Author(s).
Conflict of interest statement
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Figures
Similar articles
-
FINDUS: An Open-Source 3D Printable Liquid-Handling Workstation for Laboratory Automation in Life Sciences.SLAS Technol. 2020 Apr;25(2):190-199. doi: 10.1177/2472630319877374. Epub 2019 Sep 20. SLAS Technol. 2020. PMID: 31540570
-
OpenWorkstation: A modular open-source technology for automated in vitro workflows.HardwareX. 2020 Oct 20;8:e00152. doi: 10.1016/j.ohx.2020.e00152. eCollection 2020 Oct. HardwareX. 2020. PMID: 35498237 Free PMC article.
-
Automating hESC differentiation with 3D printing and legacy liquid handling solutions.MethodsX. 2016 Oct 29;3:569-576. doi: 10.1016/j.mex.2016.10.005. eCollection 2016. MethodsX. 2016. PMID: 27872822 Free PMC article.
-
Unlocking the efficiency of genomics laboratories with robotic liquid-handling.BMC Genomics. 2020 Oct 20;21(1):729. doi: 10.1186/s12864-020-07137-1. BMC Genomics. 2020. PMID: 33081689 Free PMC article. Review.
-
How 3D printing can boost advances in analytical and bioanalytical chemistry.Mikrochim Acta. 2021 Jul 21;188(8):265. doi: 10.1007/s00604-021-04901-2. Mikrochim Acta. 2021. PMID: 34287702 Review.
Cited by
-
Leveraging flexible pipette-based tool changes to transform liquid handling systems into dual-function sample preparation and imaging platforms.HardwareX. 2025 May 2;22:e00653. doi: 10.1016/j.ohx.2025.e00653. eCollection 2025 Jun. HardwareX. 2025. PMID: 40546787 Free PMC article.
References
-
- Lorenz M.G.O. Liquid-Handling Robotic Workstations for Functional Genomics. SLAS Technology. 2004;9:262–267. doi: 10.1016/j.jala.2004.03.010. - DOI
-
- Potgieter K., Meijboom R. Robotics-assisted high-throughput catalytic investigation of PVP nanoparticles in the oxidation of morin. J. Chem. Technol. Biotechnol. 2021;96:2547–2557. doi: 10.1002/jctb.6795. - DOI
-
- Yang X., Acevedo D., Mohammad A., Pavurala N., Wu H., Brayton A.L., Shaw R.A., Goldman M.J., He F., Li S., Fisher R.J., O’Connor T.F., Cruz C.N. Risk Considerations on Developing a Continuous Crystallization System for Carbamazepine. Org. Process Res. Dev. 2017;21:1021–1033. doi: 10.1021/acs.oprd.7b00130. - DOI
LinkOut - more resources
Full Text Sources
Miscellaneous
