

Spatial arrangement of the whiskers of harbor seals (Phoca vitulina) compared with whisker arrangements of house mice (Mus musculus) and brown rats (Rattus norvegicus)
- PMID: 39387153
- PMCID: PMC11634035
- DOI: 10.1242/jeb.247545
Spatial arrangement of the whiskers of harbor seals (Phoca vitulina) compared with whisker arrangements of house mice (Mus musculus) and brown rats (Rattus norvegicus)
Abstract
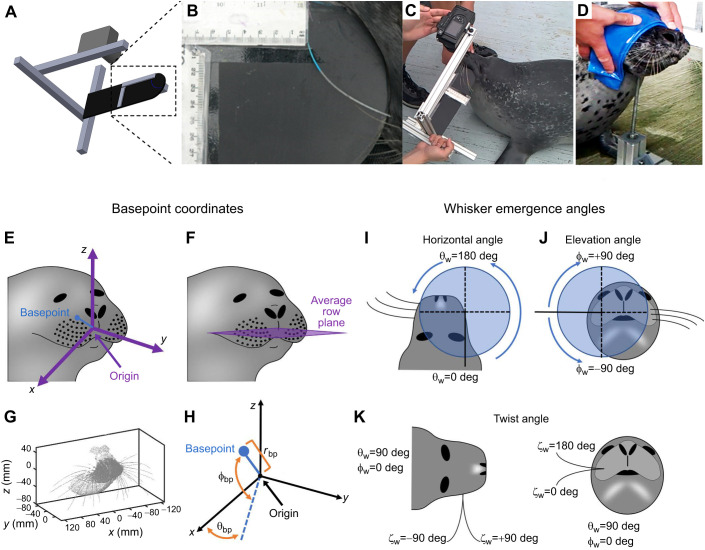
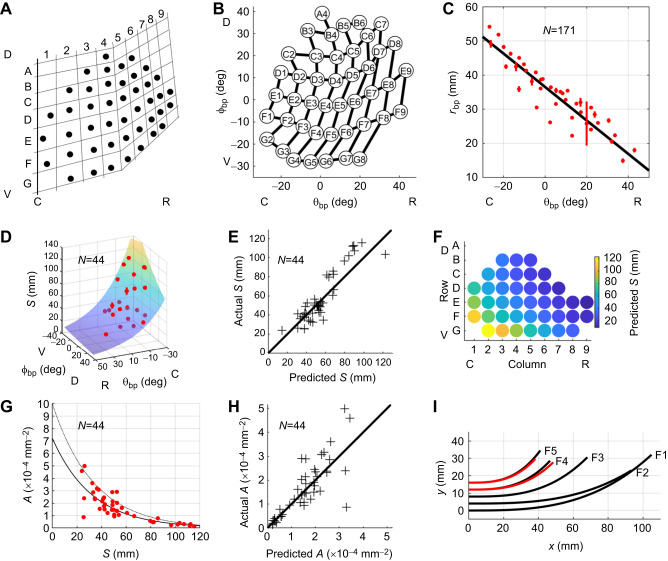
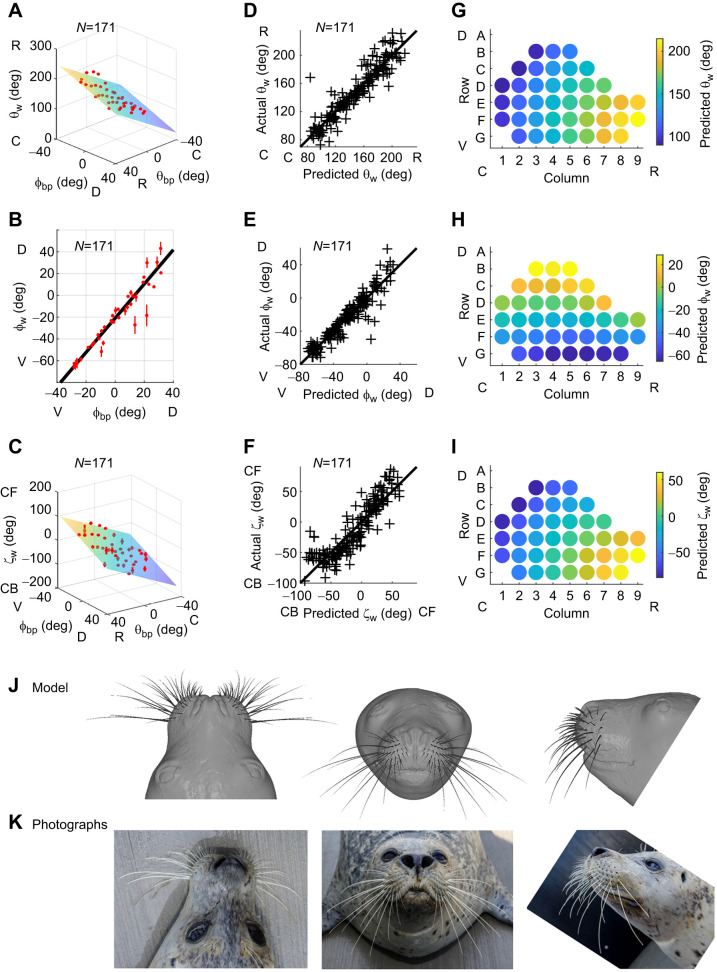
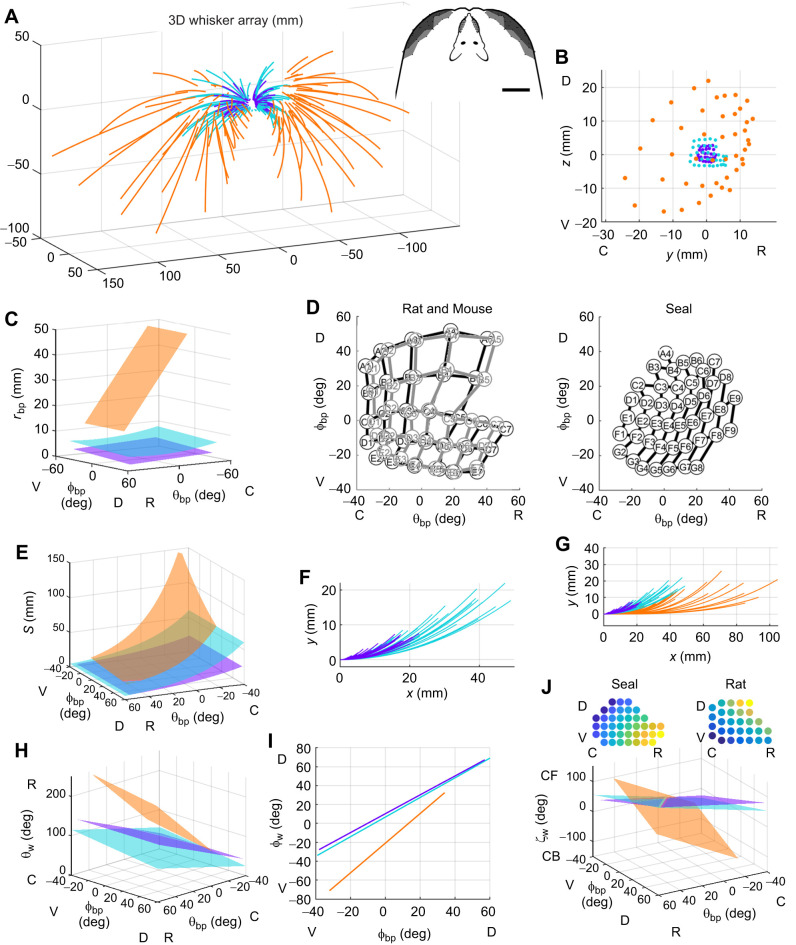
Whiskers (vibrissae) are important tactile sensors for most mammals. We introduce a novel approach to quantitatively compare 3D geometry of whisker arrays across species with different whisker numbers and arrangements, focusing on harbor seals (Phoca vitulina), house mice (Mus musculus) and Norway rats (Rattus norvegicus). Whiskers of all three species decrease in arclength and increase in curvature from caudal to rostral. They emerge from the face with elevation angles that vary linearly with dorsoventral position, and with curvature orientations that vary diagonally as linear combinations of dorsoventral and rostrocaudal positions. In seals, this diagonal varies linearly with horizontal emergence angles, and is orthogonal to the diagonal for rats and mice. This work provides the first evidence for common elements of whisker arrangements across species in different mammalian orders. Placing the whisker array model on a CAD model of a seal head enables future mechanical studies of whisker-based sensing, including wake tracking.
Keywords: Comparative anatomy; Flow sensing; Multimodal; Somatosensory; Touch; Trigeminal; Whisker.
© 2024. Published by The Company of Biologists Ltd.
Conflict of interest statement
Competing interests The authors declare no competing or financial interests.
Figures
Update of
-
Spatial arrangement of the whiskers of harbor seals ( Phoca vitulina ) compared to whisker arrangements of house mice ( Mus musculus ) and brown rats ( Rattus norvegicus ).bioRxiv [Preprint]. 2024 Sep 10:2024.01.15.575743. doi: 10.1101/2024.01.15.575743. bioRxiv. 2024. Update in: J Exp Biol. 2024 Nov 15;227(22):jeb247545. doi: 10.1242/jeb.247545. PMID: 38293081 Free PMC article. Updated. Preprint.
References
-
- Belli, H. M. (2017). Sensing with whiskers: from geometry and mechanics to the statistics of the array. PhD thesis, Northwestern University. ProQuest/UMI, 253 pages (Publication No. 10681095). 10.21985/N2WF4K - DOI
-
- Bookstein, F. L. (2018). A Course in Morphometrics for Biologists. Cambridge University Press.
Publication types
MeSH terms
Grants and funding
- VolkswagenStiftung
- IOS-0846088/National Science Foundation
- R01-NS116277/NH/NIH HHS/United States
- R01 NS116277/NS/NINDS NIH HHS/United States
- Volkswagen Foundation
- DE 538/9-2/Deutsche Forschungsgemeinschaft
- McCormick School of Engineering, Northwestern University
- R01-NS116277/Office for Extramural Research, National Institutes of Health
- T32 HD057845/HD/NICHD NIH HHS/United States
- TL1 TR001447/TR/NCATS NIH HHS/United States
- Deutsche Forschungsgemeinschaft SPP1207-DE-538/9-2 and SPP1207-HA-4411/8-1)
- F31 NS090872/NS/NINDS NIH HHS/United States
LinkOut - more resources
Full Text Sources
Miscellaneous
