

An improved nonsingular adaptive super twisting sliding mode controller for quadcopter
- PMID: 39388422
- PMCID: PMC11466434
- DOI: 10.1371/journal.pone.0309098
An improved nonsingular adaptive super twisting sliding mode controller for quadcopter
Abstract
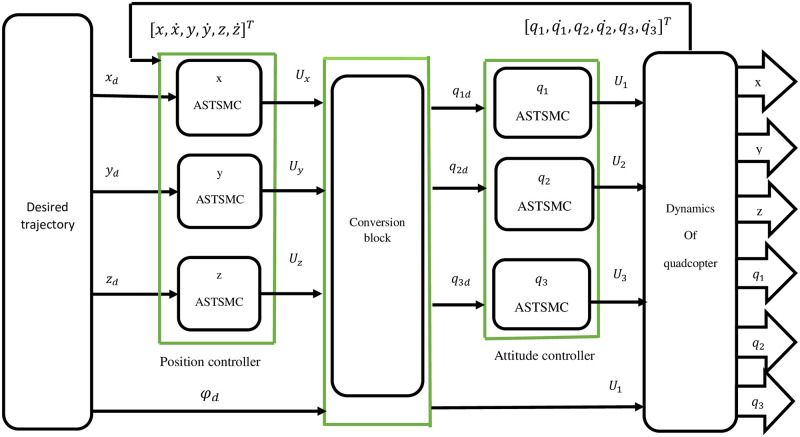
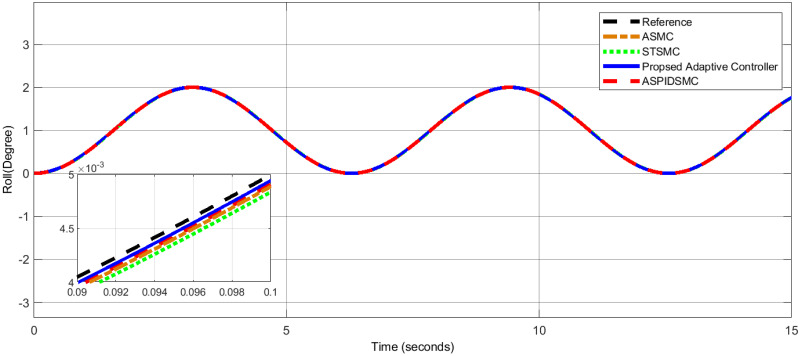
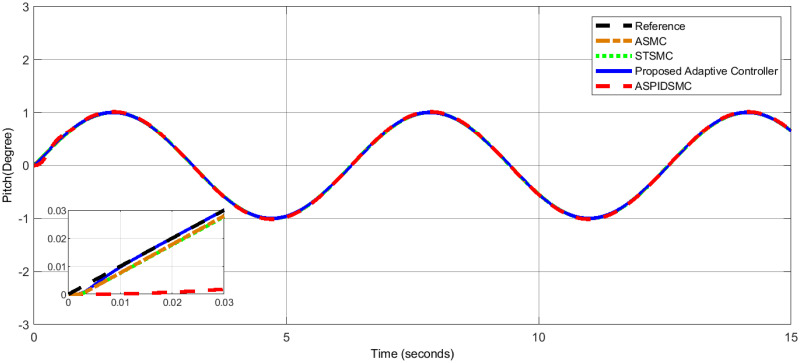
This paper presents an improved nonsingular adaptive super twisting sliding mode control for tracking of a quadrotor system in the presence of external disturbances and uncertainty. The initial step involves developing a dynamic model for the quadrotor that is free from singularities, achieved through the utilization of the Newton-Quaternion formalism. Then, the super twisting algorithm is used to develop a novel sliding mode control that mitigates chattering. Particle Swarm Optimization (PSO) is employed for the adjustment of the controller gains. Moreover, to maintain stable control of the quadcopter, even in scenarios where the upper limit of disturbances is unknown, an adaptive rule grounded in Lyapunov stability is applied. Simulation results demonstrate that the proposed controller reduces tracking errors to 0.1% for roll, 0.05% for pitch, and 2.2% for altitude, outperforming other state-of-the-art sliding mode controllers. Additionally, the proposed controller effectively rejects disturbances, maintaining minimal steady-state errors of 0.01° for roll, 0.02° for pitch, and 0.001° for yaw, significantly better than conventional controllers. These results highlight tracking and disturbance rejection capabilities of the proposed controller, making its real-time implementation for quadrotor Unmanned Aerial Vehicles (UAVs) feasible.
Copyright: © 2024 Abera et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures














References
-
- Chen K, Ye C, Wu C, Wang H, Jin L, Zhu F, et al. A novel open-closed-loop control strategy for quadrotor trajectory tracking on real-time control and acquisition platform. Appl Sci. 2023. Mar;13(5):3251. doi: 10.3390/app13053251 - DOI
-
- Okyere E, Bousbaine A, Poyi GT, Joseph AK, Andrade JM. LQR controller design for quad-rotor helicopters. J Eng. 2019. Jun;2019(17):4003–4007. doi: 10.1049/joe.2018.8126 - DOI
-
- Reddy Maddikunta PK, Hakak S, Alazab M, Bhattacharya S, Gadekallu TR, Khan WZ, et al. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges. IEEE Sensors J. 2021. Aug;21(16):17608–17619. doi: 10.1109/JSEN.2021.3049471 - DOI
-
- Eltayeb A, Rahmat MF, Basri MAM, Eltoum MAM, Mahmoud MS. Integral adaptive sliding mode control for quadcopter UAV under variable payload and disturbance. IEEE Access. 2022;10:94754–94764. doi: 10.1109/ACCESS.2022.3203058 - DOI
-
- Nguyen NP, Mung NX, Thanh HLNN, Huynh TT, Lam NT, Hong SK. Adaptive sliding mode control for attitude and altitude system of a quadcopter UAV via neural network. IEEE Access. 2021;9:40076–40085. doi: 10.1109/ACCESS.2021.3064883 - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
