

Design of a low-cost force insoles to estimate ground reaction forces during human gait
- PMID: 39398532
- PMCID: PMC11471240
- DOI: 10.1016/j.ohx.2024.e00589
Design of a low-cost force insoles to estimate ground reaction forces during human gait
Abstract
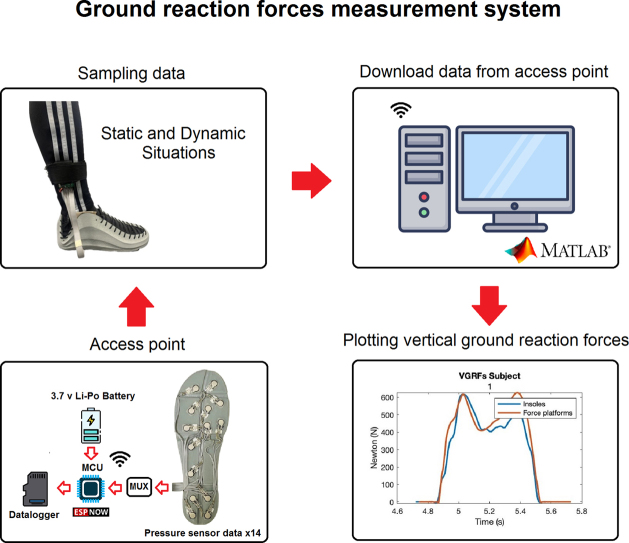
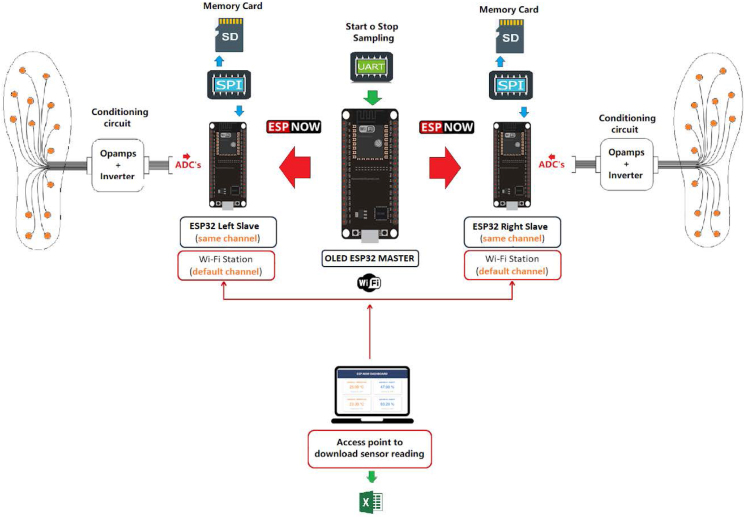
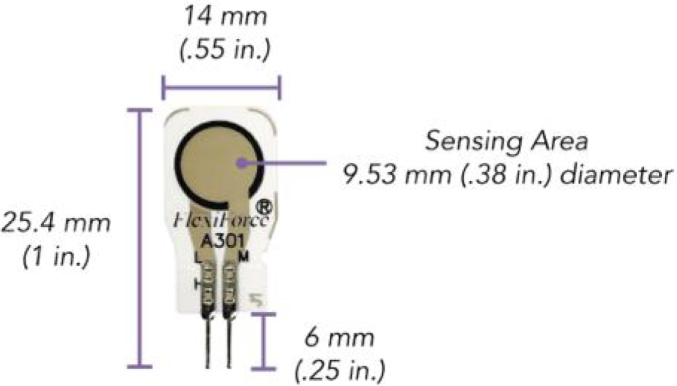
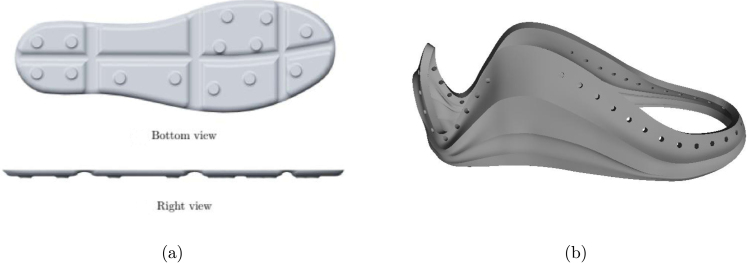
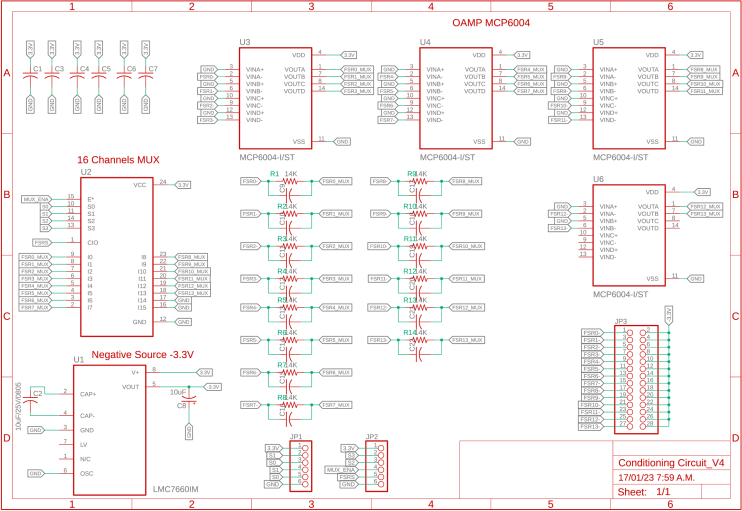
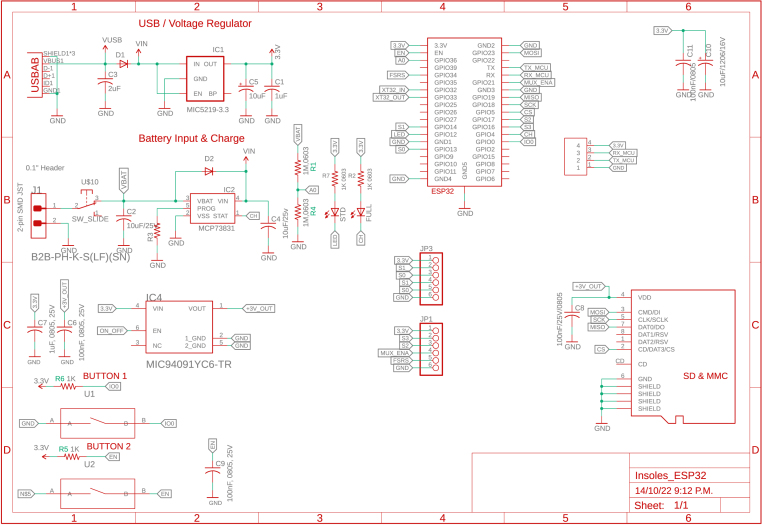
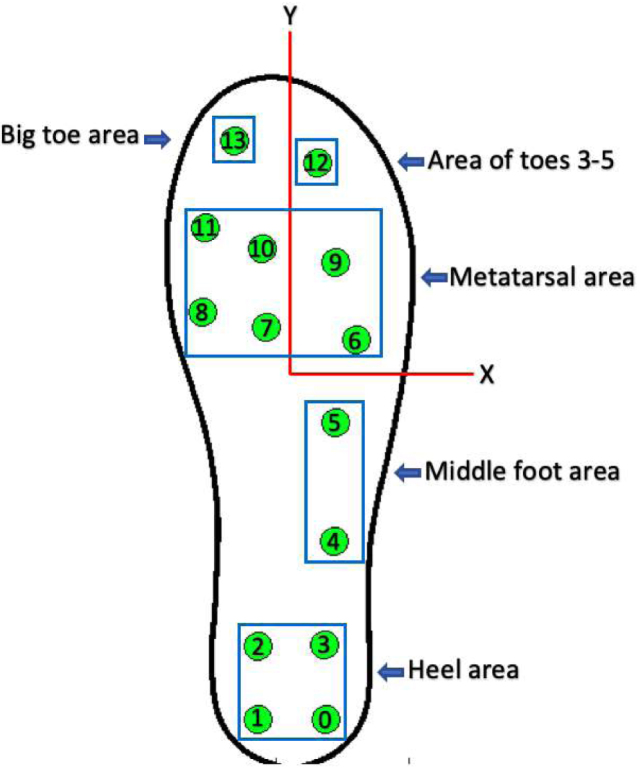
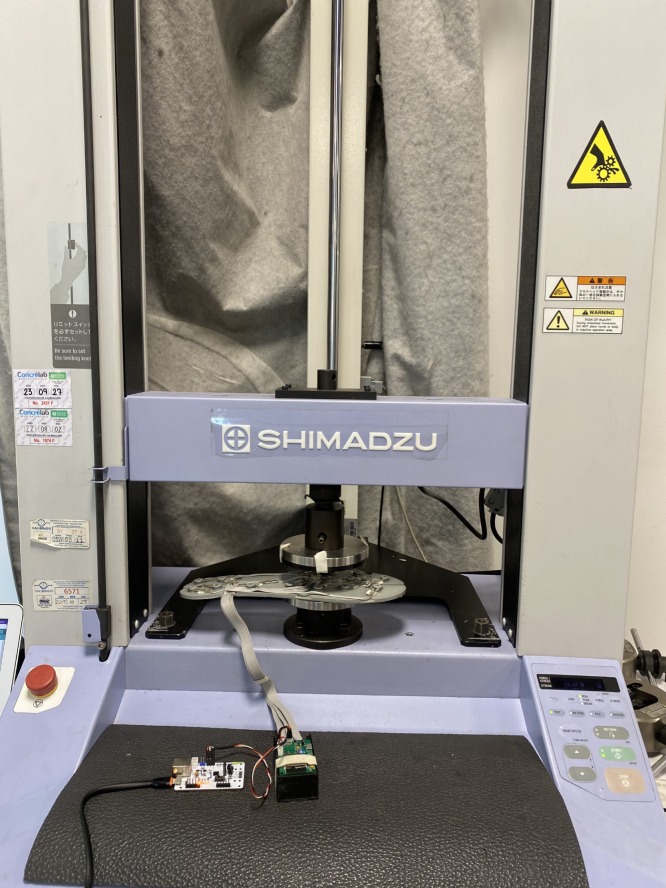
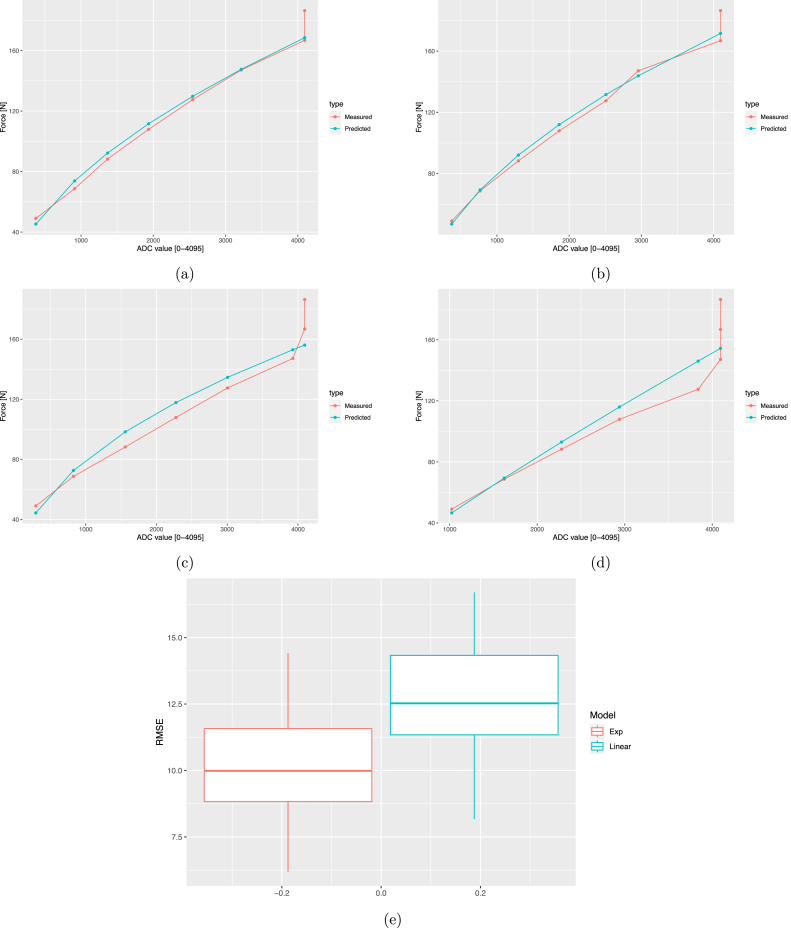
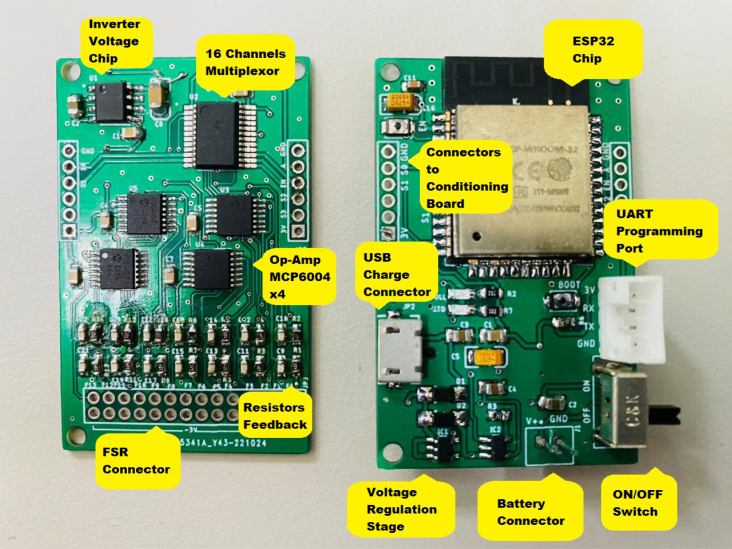
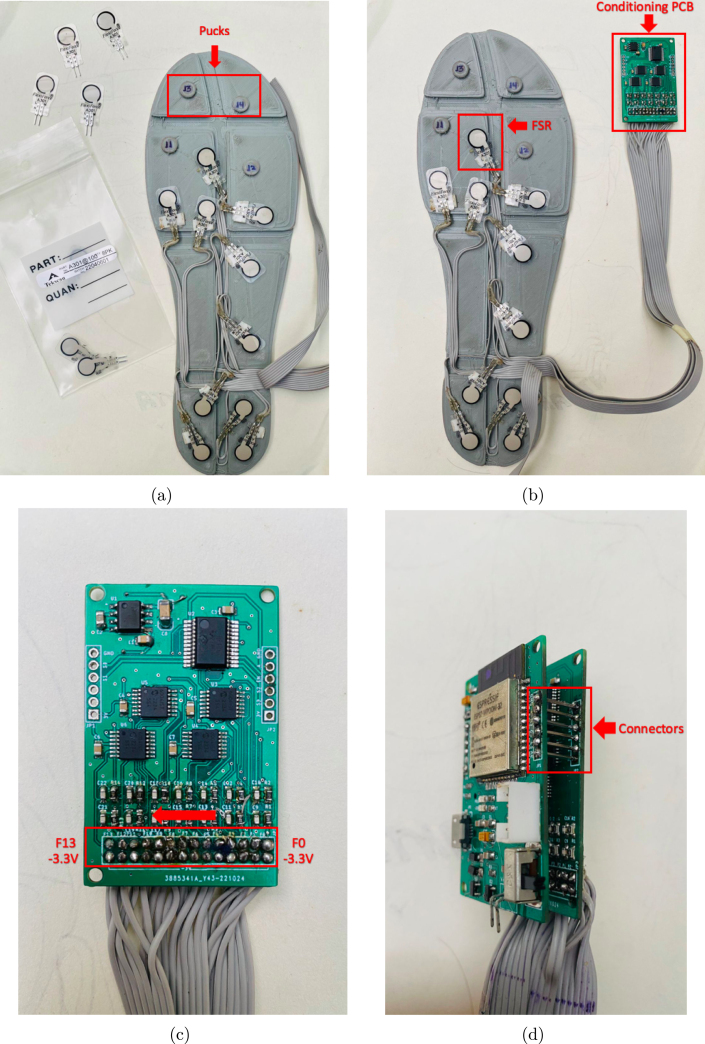
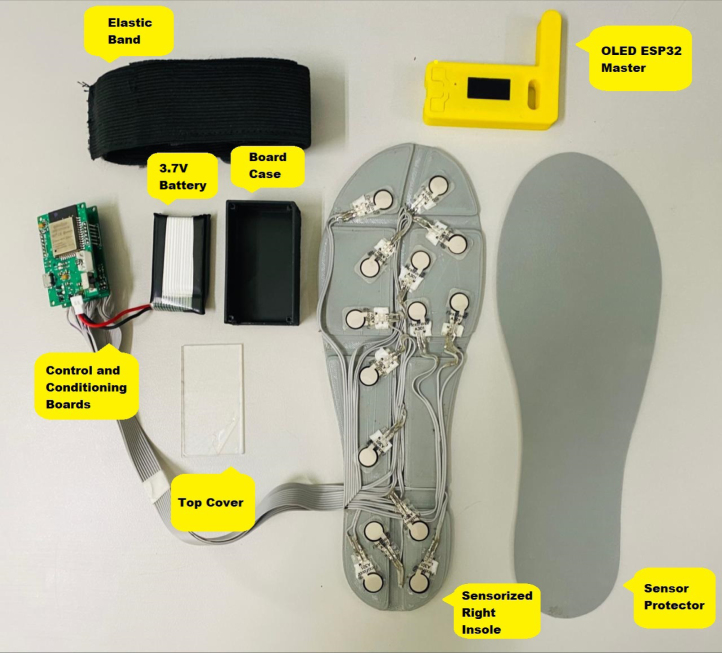
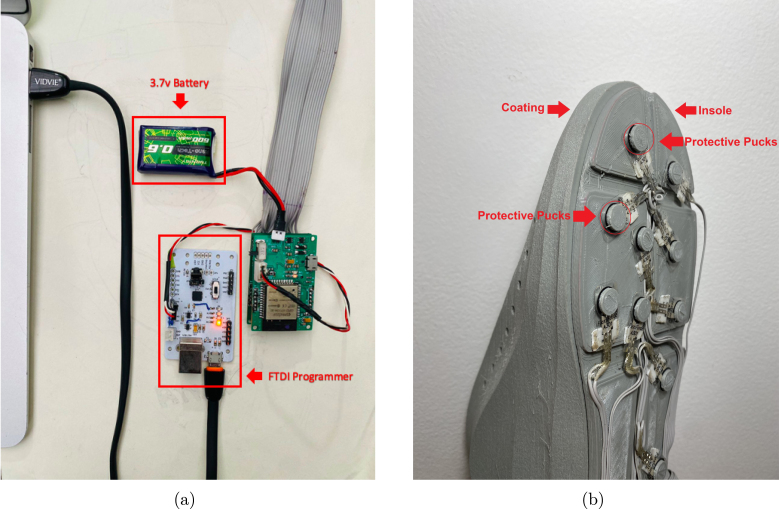
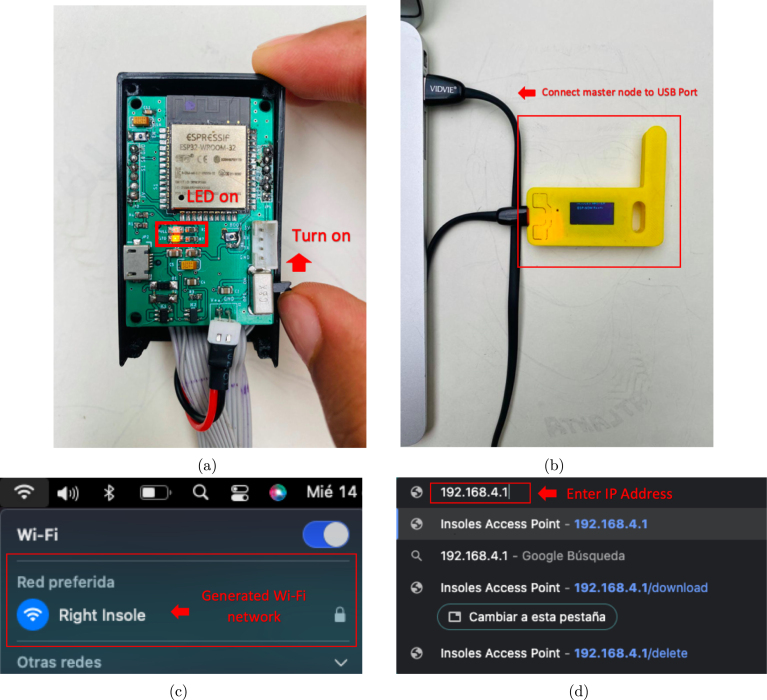
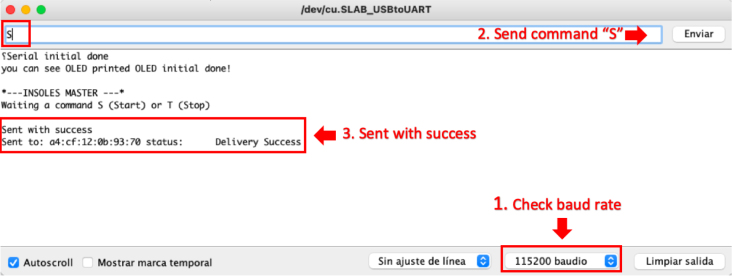
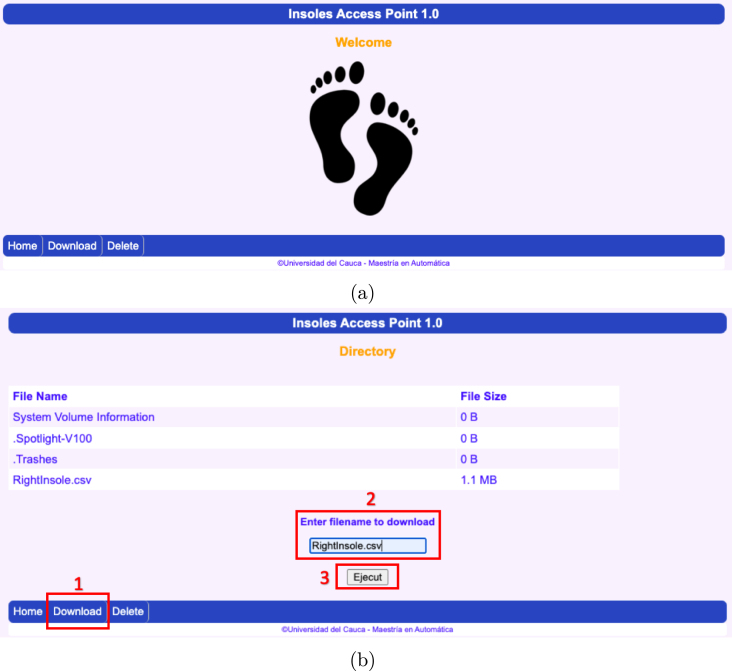
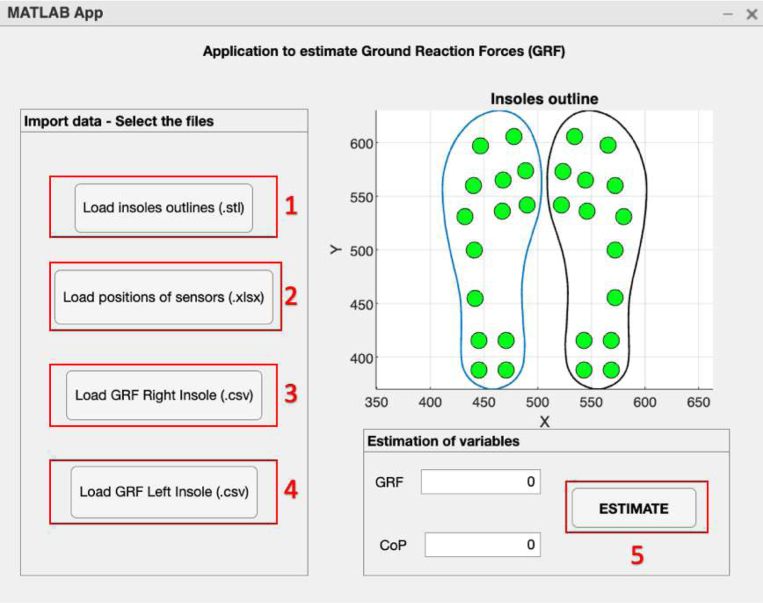
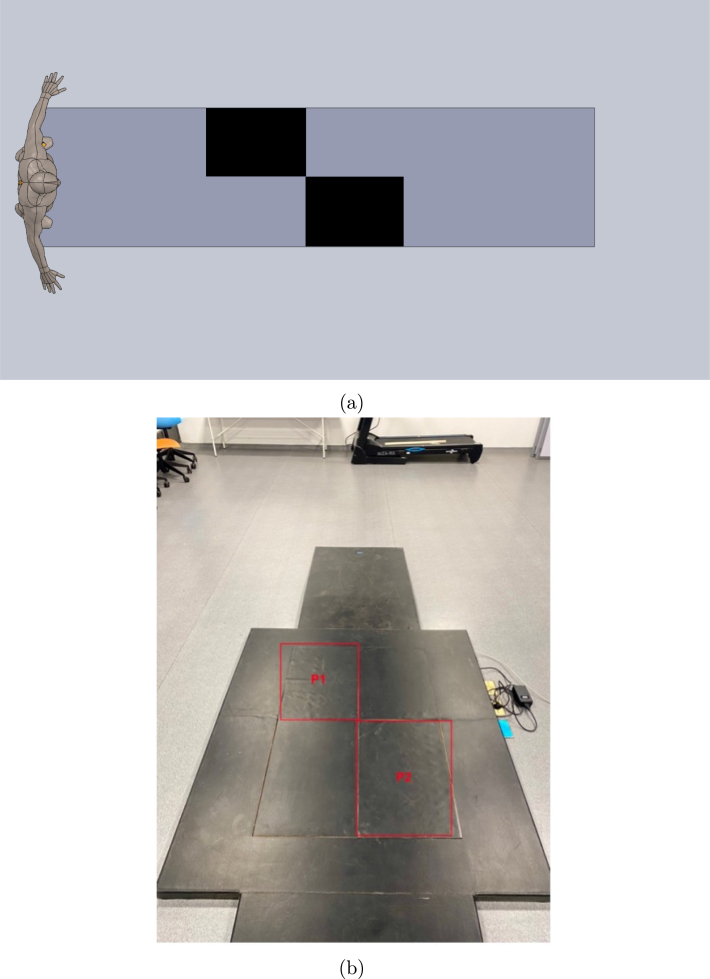
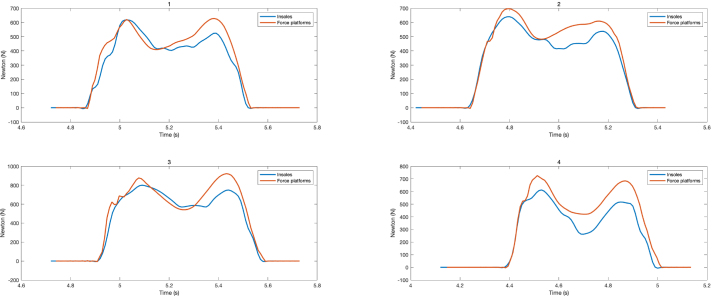
This paper proposes a low-cost electronic system for estimating ground reaction forces (GRF) during human gait. The device consists of one master node and two slave nodes. The master node sends instructions to slave nodes that sample and store data from two force insoles located at the participant's feet. These insoles are equipped with 14 piezo-resistive FlexiForce A301 sensors (FSR). The slave nodes are attached to the ankles and feet of each participant. Subsequently, the start command is transmitted through the master node, which is connected to the USB port of a personal computer (PC). Once the walking session is completed, the information obtained by the slave nodes can be downloaded by accessing the access point generated by these devices through Wi-Fi communication. The GRF estimation system was validated with force platforms (BTS Bioengineering P6000, Italy), giving on average a fit measure equal to in dynamic situations. Future versions of this device are expected to increase this fit by using machine learning models.
Keywords: 3D printing; ESP32 microcontrollers; Force insoles; Ground reaction forces; Low-cost; Piezo-resistive sensors.
© 2024 The Authors. Published by Elsevier Ltd.
Figures



References
-
- Guo R., Cheng X., Hou Z.-C., Ma J.-Z., Zheng W.-Q., Wu X.-M., Jiang D., Pan Y., Ren T.-L. A shoe-integrated sensor system for long- term center of pressure evaluation. IEEE Sens. J. 2021;21(23):27037–27044. doi: 10.1109/JSEN.2021.3116249. [Online]. Available: - DOI
-
- Choi H., Lee C., Shim M., Han J., Baek Y. Design of an artificial neural network algorithm for a low-cost insole sensor to estimate the ground reaction force (GRF) and calibrate the center of pressure (CoP) Sensors (Switzerland) 2018;18(12) doi: 10.3390/s18124349. [Online]. Available: - DOI - PMC - PubMed
LinkOut - more resources
Full Text Sources
