

Artificial Intelligence for the Evaluation of Postures Using Radar Technology: A Case Study
- PMID: 39409248
- PMCID: PMC11478366
- DOI: 10.3390/s24196208
Artificial Intelligence for the Evaluation of Postures Using Radar Technology: A Case Study
Abstract
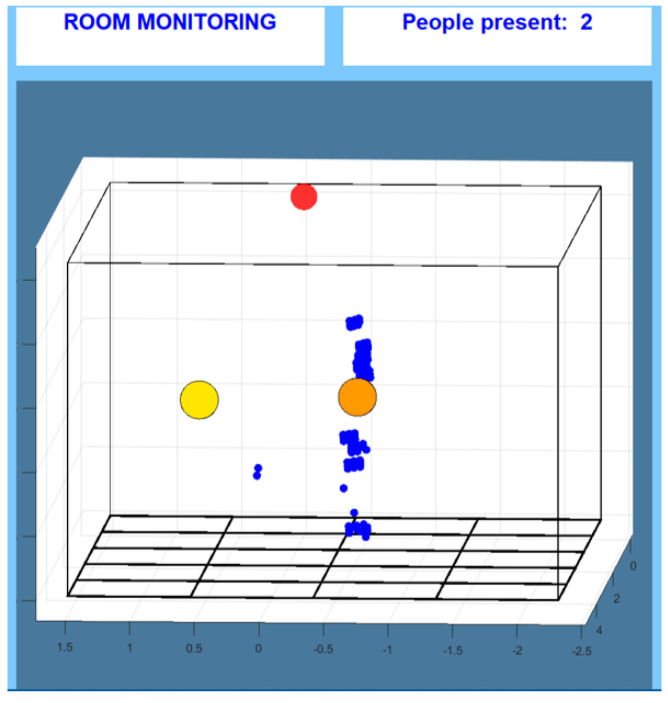
In the last few decades, major progress has been made in the medical field; in particular, new treatments and advanced health technologies allow for considerable improvements in life expectancy and, more broadly, in quality of life. As a consequence, the number of elderly people is expected to increase in the following years. This trend, along with the need to improve the independence of frail people, has led to the development of unobtrusive solutions to monitor daily activities and provide feedback in case of risky situations and falls. Monitoring devices based on radar sensors represent a possible approach to tackle postural analysis while preserving the person's privacy and are especially useful in domestic environments. This work presents an innovative solution that combines millimeter-wave radar technology with artificial intelligence (AI) to detect different types of postures: a series of algorithms and neural network methodologies are evaluated using experimental acquisitions with healthy subjects. All methods produce very good results according to the main parameters evaluating performance; the long short-term memory (LSTM) and GRU show the most consistent results while, at the same time, maintaining reduced computational complexity, thus providing a very good candidate to be implemented in a dedicated embedded system designed to monitor postures.
Keywords: LSTM; artificial intelligence; embedded systems; fall detection; posture analysis; radar technology.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures





















References
-
- United Nations . World Population Prospects (2024 Revision) Department of Economic and Social Affairs Population Division; New York, NY, USA: 2024.
-
- Blackman S., Matlo C., Bobrovitskiy C., Waldoch A., Fang M.L., Jackson P., Mihailidis A., Nygård L., Astell A., Sixsmith A. Ambient Assisted Living Technologies for Aging Well: A Scoping Review. J. Intell. Syst. 2016;25:55–69. doi: 10.1515/jisys-2014-0136. - DOI
-
- Bahbouh N.M., Abi Sen A.A., Alsehaimi A.A.A., Alsuhaymi E.A. A Framework for Supporting Ambient Assisted Living for Users of Special Needs; Proceedings of the 2022 9th International Conference on Computing for Sustainable Global Development (INDIACom); New Delhi, India. 23–25 March 2022; pp. 427–432.
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
Research Materials
