

Needle Tip Tracking through Photoluminescence for Minimally Invasive Surgery
- PMID: 39451683
- PMCID: PMC11505679
- DOI: 10.3390/bios14100470
Needle Tip Tracking through Photoluminescence for Minimally Invasive Surgery
Abstract
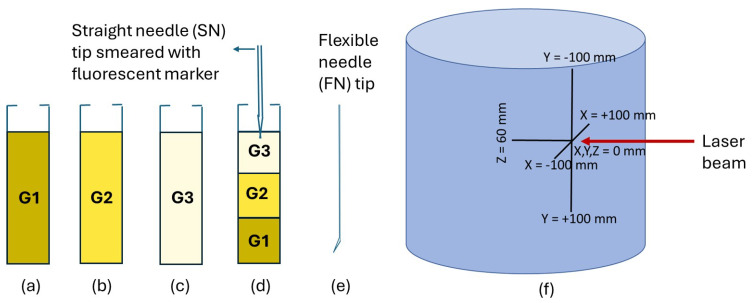
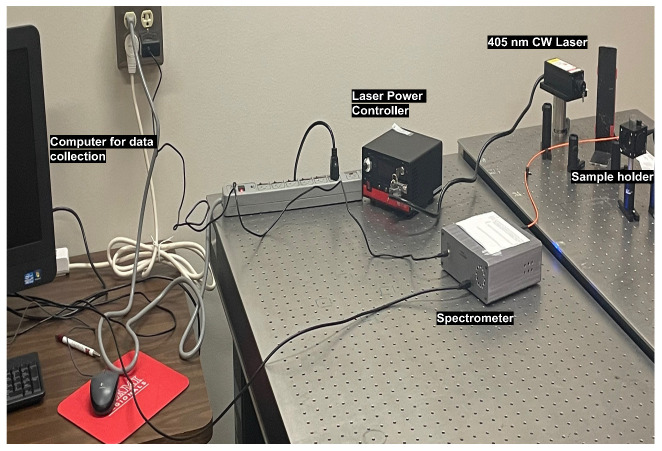
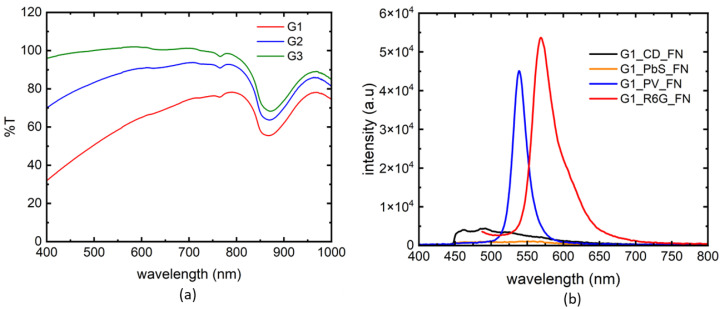
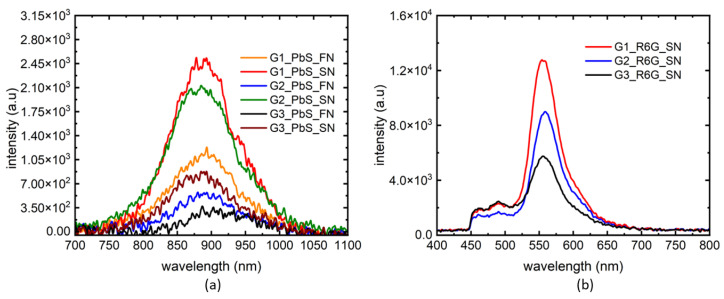
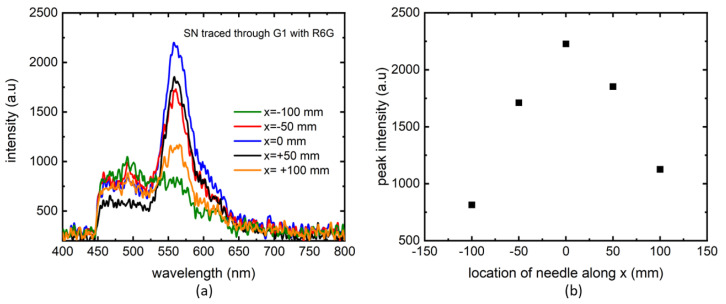
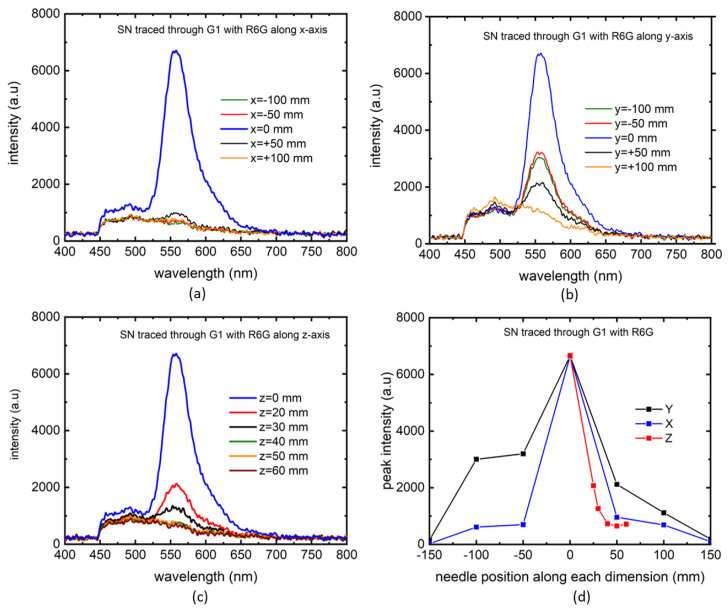
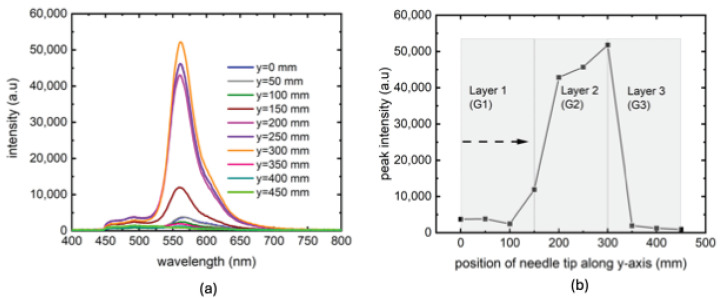
Minimally invasive surgery continues to prioritize patient safety by improving imaging techniques and tumor detection methods. In this work, an all-optical alternative to the current image based techniques for in vitro minimally invasive procedures has been explored. The technique uses a highly fluorescent marker for the surgical needle to be tracked inside simulated tissues. A series of markers were explored including inorganic (Perovskite and PbS) and organic (carbon dots) nanoparticles and organic dye (Rhodamine 6G) to identify layers of different stiffnesses within a tissue. Rhodamine 6G was chosen based on its high fluorescence signal to track 3D position of a surgical needle in a tissue. The needle was tracked inside homogeneous and inhomogeneous gelatin tissues successfully. This exploratory study of tissue characterization and needle tip tracking using fluorescent markers or photoluminescence technique show potential for real-time application of robot-assisted needle insertions during in vivo procedures.
Keywords: biosensors; fluorescent markers; minimally invasive surgery; needle tip tracking; photoluminescence.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Narayan M., Fey A.M., Choti M.A. Data-driven detection of adverse events in robotic needle steering; Proceedings of the 2018 International Symposium on Medical Robotics (ISMR); Atlanta, GA, USA. 1–3 March 2018; pp. 1–6.
-
- Kuo C.H., Dai J.S. Robotics for minimally invasive surgery: A historical review from the perspective of kinematics; Proceedings of the International Symposium on History of Machines and Mechanisms, HMM; Tainan, Taiwan. 11–14 November 2008; Berlin/Heidelberg, Germany: Springer; 2009. pp. 337–354.
-
- Rossa C., Tavakoli M. Issues in closed-loop needle steering. Control Eng. Pract. 2017;62:55–69. doi: 10.1016/j.conengprac.2017.03.004. - DOI
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
