

In Situ Growth of Mushroom-Shaped Adhesive Structures on Flat/Curved Surfaces via Electrical Modulation
- PMID: 39499770
- PMCID: PMC11672313
- DOI: 10.1002/advs.202408680
In Situ Growth of Mushroom-Shaped Adhesive Structures on Flat/Curved Surfaces via Electrical Modulation
Abstract
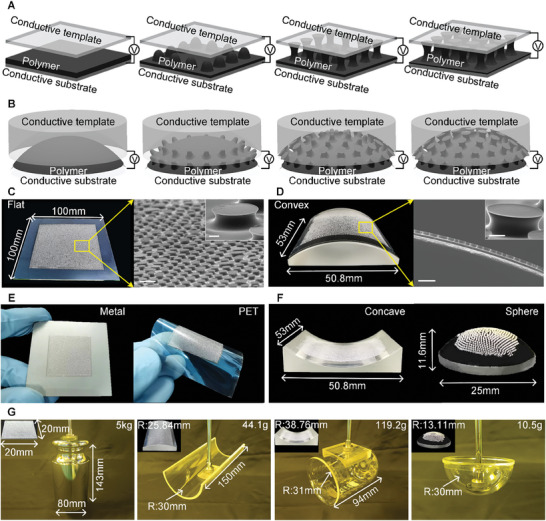
Gecko-inspired adhesives have an extraordinary impact on robotic manipulation and locomotion. However, achieving excellent adhesive performance on curved surfaces, especially undevelopable surfaces, is still challenging. This can be attributed to a considerable difference between the fabrication method and practical necessity, i.e., the adhesive structures are generally fabricated on a flat substrate whereas the manipulating surface is curved, resulting in a low adhesive strength. Here, an in-situ growth strategy is proposed to fabricate mushroom-shaped structures at micro/nano-scale via electrical modulation on flat or curved surfaces. Since the adhesive structures are directly grown on target surfaces without a transfer procedure, they exhibit a large contact area and stress uniformity at the interface, corresponding to an excellent adhesive force. A comparison between grown structures using the proposed method and those fabricated using traditional approaches suggests that the adhesive forces are identical for flat testing surfaces, while the difference can be up to 4 times for developable surfaces and even 25 times for undevelopable surfaces. The proposed adhesion strategy extends the application prospects of gecko-inspired adhesives from flat surfaces to curved ones, composed of developable and undevelopable surfaces, opening a new avenue to develop gecko-inspired adhesive-based devices and systems.
Keywords: curved surface; dry adhesive; electrical modulation; in situ growth.
© 2024 The Author(s). Advanced Science published by Wiley‐VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures



Similar articles
-
Core-shell dry adhesives for rough surfaces via electrically responsive self-growing strategy.Nat Commun. 2022 Dec 10;13(1):7659. doi: 10.1038/s41467-022-35436-6. Nat Commun. 2022. PMID: 36496484 Free PMC article.
-
Mushroom-Shaped Adhesive Structures with Smooth Contour via Electrical Growth.ACS Appl Mater Interfaces. 2025 May 21;17(20):30170-30180. doi: 10.1021/acsami.4c21993. Epub 2025 Apr 16. ACS Appl Mater Interfaces. 2025. PMID: 40238387
-
Gecko-Inspired Intelligent Adhesive Structures for Rough Surfaces.Research (Wash D C). 2025 Feb 25;8:0630. doi: 10.34133/research.0630. eCollection 2025. Research (Wash D C). 2025. PMID: 40007620 Free PMC article.
-
Gecko-Inspired Controllable Adhesive: Structure, Fabrication, and Application.Biomimetics (Basel). 2024 Mar 1;9(3):149. doi: 10.3390/biomimetics9030149. Biomimetics (Basel). 2024. PMID: 38534834 Free PMC article. Review.
-
Gecko-inspired surfaces: a path to strong and reversible dry adhesives.Adv Mater. 2010 May 18;22(19):2125-37. doi: 10.1002/adma.200903200. Adv Mater. 2010. PMID: 20349430 Review.
References
-
- Autumn K., Liang Y. A., Hsieh S. T., Zesch W., Chan W. P., Kenny T. W., Fearing R., Full R. J., Nature. 2000, 405, 681. - PubMed
-
- Geim A. K., Dubonos S., Grigorieva I., Novoselov K., Zhukov A., Shapoval S. Y., Nat. Mater. 2003, 2, 461. - PubMed
-
- Kim D. G., Je H., Hart A. J., Kim S., Friction. 2023, 11, 1974.
Grants and funding
LinkOut - more resources
Full Text Sources