

Sensory artificial cilia for in situ monitoring of airway physiological properties
- PMID: 39508764
- PMCID: PMC11573673
- DOI: 10.1073/pnas.2412086121
Sensory artificial cilia for in situ monitoring of airway physiological properties
Abstract
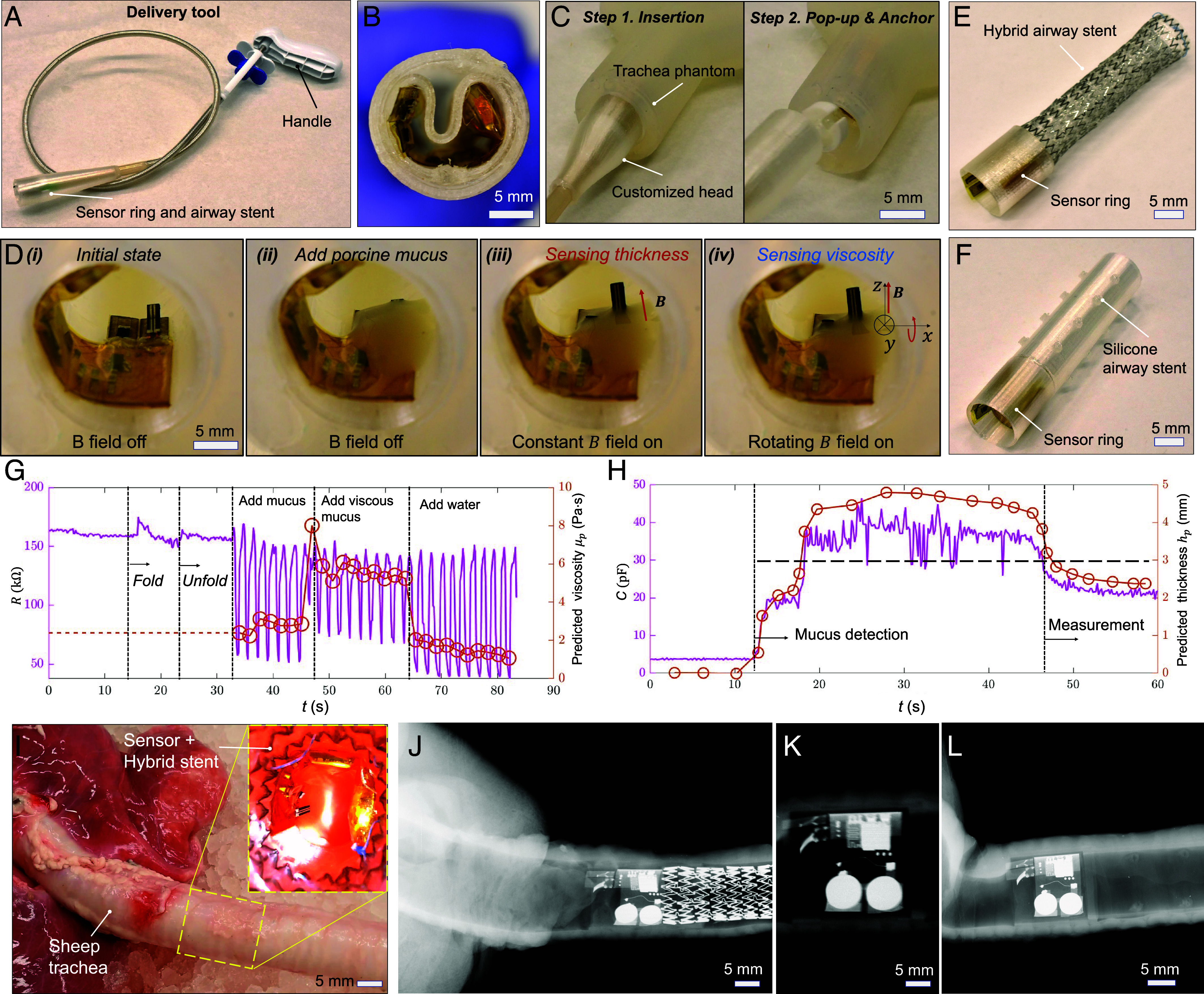
Continuously monitoring human airway conditions is crucial for timely interventions, especially when airway stents are implanted to alleviate central airway obstruction in lung cancer and other diseases. Mucus conditions, in particular, are important biomarkers for indicating inflammation and stent patency but remain challenging to monitor. Current methods, reliant on computational tomography imaging and bronchoscope inspection, pose risks due to radiation and lack the ability to provide continuous real-time feedback outside of hospitals. Inspired by the sensing ability of biological cilia, we report wireless sensing mechanisms in sensory artificial cilia for detecting mucus conditions, including viscosity and layer thickness, which are crucial biomarkers for disease severity. The sensing mechanism for mucus viscosity leverages external magnetic fields to actuate a magnetic artificial cilium and sense its shape using a flexible strain-gauge. Additionally, we report an artificial cilium with capacitance sensing for mucus layer thickness, offering unique self-calibration, adjustable sensitivity, and range, all enabled by external magnetic fields. To enable prolonged and wireless data access, we integrate Bluetooth Low Energy communication and onboard power, along with a wearable magnetic actuation system for sensor activation. We validate our method by deploying the sensor independently or in conjunction with an airway stent within a trachea phantom and sheep trachea ex vivo. The proposed sensing mechanisms and devices pave the way for real-time monitoring of mucus conditions, facilitating early disease detection and providing stent patency alerts, thereby allowing timely interventions and personalized care.
Keywords: airway stent; artificial cilia; lung; magnetic actuation; mucus sensing.
Conflict of interest statement
Competing interests statement:X.D. and Y.W. have a pending provisional patent.
Figures





Similar articles
-
Wirelessly Actuated Ciliary Airway Stent for Excessive Mucus Transportation.Adv Mater Technol. 2023 Dec 13;8(23):2301003. doi: 10.1002/admt.202301003. Epub 2023 Oct 31. Adv Mater Technol. 2023. PMID: 39949354 Free PMC article.
-
Sensing Mucus Physiological Property In Situ by Wireless Millimeter-Scale Soft Robots.Adv Funct Mater. 2024 Feb 19;34(8):2307751. doi: 10.1002/adfm.202307751. Epub 2023 Nov 8. Adv Funct Mater. 2024. PMID: 39990597 Free PMC article.
-
Capacitive Sensing for Monitoring Stent Patency in the Central Airway.Annu Int Conf IEEE Eng Med Biol Soc. 2021 Nov;2021:5441-5445. doi: 10.1109/EMBC46164.2021.9630965. Annu Int Conf IEEE Eng Med Biol Soc. 2021. PMID: 34892357
-
Movement and coordination of tracheal cilia and the relation of these to mucus transport.Prog Clin Biol Res. 1982;80:19-24. doi: 10.1002/cm.970020706. Prog Clin Biol Res. 1982. PMID: 6212939 Review. No abstract available.
-
Wireless Technologies in Flexible and Wearable Sensing: From Materials Design, System Integration to Applications.Adv Mater. 2024 Jul;36(27):e2400333. doi: 10.1002/adma.202400333. Epub 2024 Apr 30. Adv Mater. 2024. PMID: 38652082 Review.
References
-
- Guibert N., Saka H., Dutau H., Airway stenting: Technological advancements and its role in interventional pulmonology. Respirology 25, 953–962 (2020). - PubMed
-
- Ernst A., Feller-Kopman D., Becker H. D., Mehta A. C., Central airway obstruction. Am. J. Respir Crit. Care Med. 169, 1278–1297 (2004). - PubMed
-
- Herlitz G. N., Sternberg D. I., Palazzo R., Arcasoy S., Sonett J. R., Treatment of bronchomalacia in cystic fibrosis by silicone stent. Ann. Thorac. Surg. 82, 2268–2270 (2006). - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
