

The Posture Detection Method of Caged Chickens Based on Computer Vision
- PMID: 39518783
- PMCID: PMC11545082
- DOI: 10.3390/ani14213059
The Posture Detection Method of Caged Chickens Based on Computer Vision
Abstract
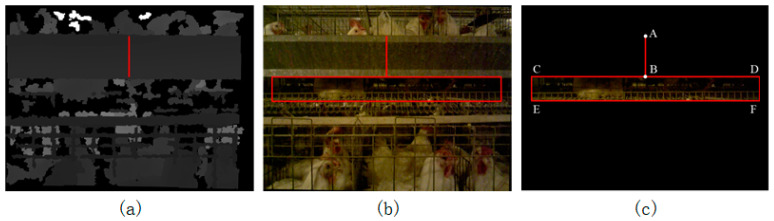
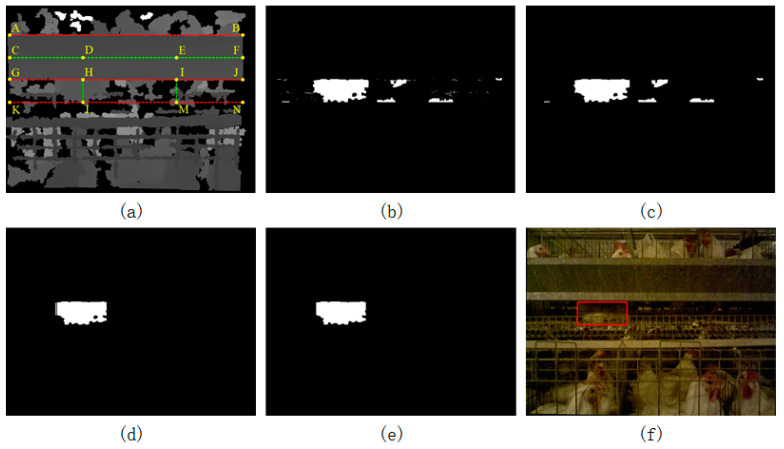
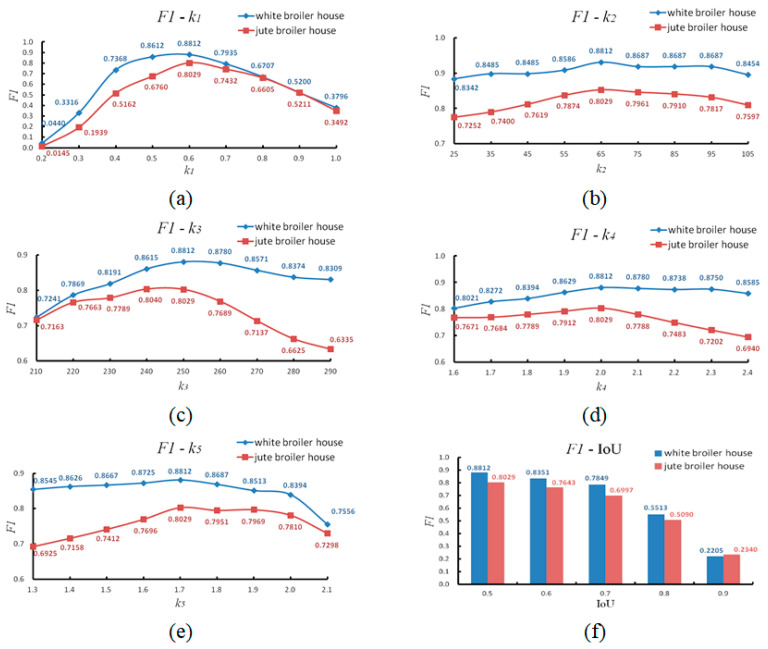
At present, raising caged chickens is a common farming method in China. However, monitoring the status of caged chickens is still done by human labor, which is time-consuming and laborious. This paper proposed a posture detection method for caged chickens based on computer vision, which can automatically identify the standing and lying posture of chickens in a cage. For this aim, an image correction method was used to rotate the image and make the feeding trough horizontal in the image. The variance method and the speeded-up robust features method were proposed to identify the feeding trough and indirectly obtain the key area through the feeding trough position. In this paper, a depth camera was used to generate three-dimensional information so that it could extract the chickens from the image of the key area. After some constraint conditions, the chickens' postures were screened. The experimental results show that the algorithm can achieve 97.80% precision and 80.18% recall (IoU > 0.5) for white chickens and can achieve 79.52% precision and 81.07% recall (IoU > 0.5) for jute chickens (yellow and black feathers). It runs at ten frames per second on an i5-8500 CPU. Overall, the results indicated that this study provides a non-invasive method for the analysis of posture in caged chickens, which may be helpful for future research on poultry.
Keywords: caged chicken; computer vision; depth image; posture detection; smart agriculture.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures












References
-
- Majewski E., Potori N., Sulewski P., Wąs A., Mórawska M., Gębska M., Malak-Rawlikowska A., Grontkowska A., Szili V., Erdős A. End of the Cage Age? A Study on the Impacts of the Transition from Cages on the EU Laying Hen Sector. Agriculture. 2024;14:111. doi: 10.3390/agriculture14010111. - DOI
-
- Wang L., Zhang Y., Kong L., Wang Z., Bai H., Jiang Y., Bi Y., Chang G., Chen G. Effects of rearing system (floor vs. cage) and sex on performance, meat quality and enteric microorganism of yellow feather broilers. J. Integr. Agric. 2021;20:1907–1920. doi: 10.1016/S2095-3119(20)63420-7. - DOI
-
- Wang Y., Ru Y., Liu G., Chang W., Zhang S., Yan H., Zheng A., Lou R., Liu Z., Cai H. Effects of different rearing systems on growth performance, nutrients digestibility, digestive organ weight, carcass traits, and energy utilization in male broiler chickens. Livest. Sci. 2015;176:135–140. doi: 10.1016/j.livsci.2015.03.010. - DOI
-
- Sun Z., Zhang M., Liu J., Wang J., Wu Q., Wang G. Research on white feather broiler health monitoring method based on sound detection and transfer learning. Comput. Electron. Agric. 2023;214:108319. doi: 10.1016/j.compag.2023.108319. - DOI
Grants and funding
- 2021YFD1300101/National Key Research and Development Plan
- 2023A1515110691/Guangdong Basic and Applied Basic Research Foundation
- 2023KJ129/Guangdong Province Special Fund for Modern Agricultural Industry Common Key Technology R&D Innovation Team
- ZQQZ-31/Project of State Key Laboratory of Swine and Poultry Breeding Industry
- 2024B03J1353/Guangzhou Science and Technology Planning Project
LinkOut - more resources
Full Text Sources
