

ONIX: a unified open-source platform for multimodal neural recording and perturbation during naturalistic behavior
- PMID: 39528678
- PMCID: PMC11725498
- DOI: 10.1038/s41592-024-02521-1
ONIX: a unified open-source platform for multimodal neural recording and perturbation during naturalistic behavior
Abstract
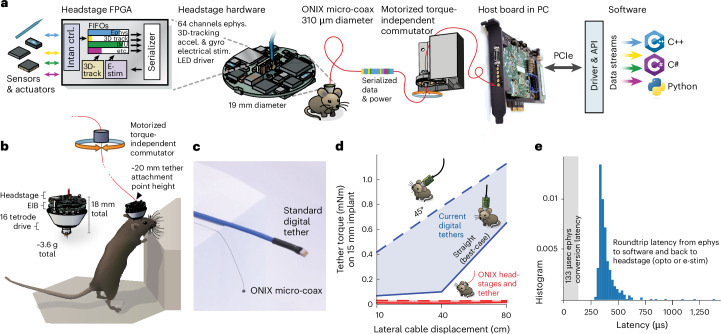
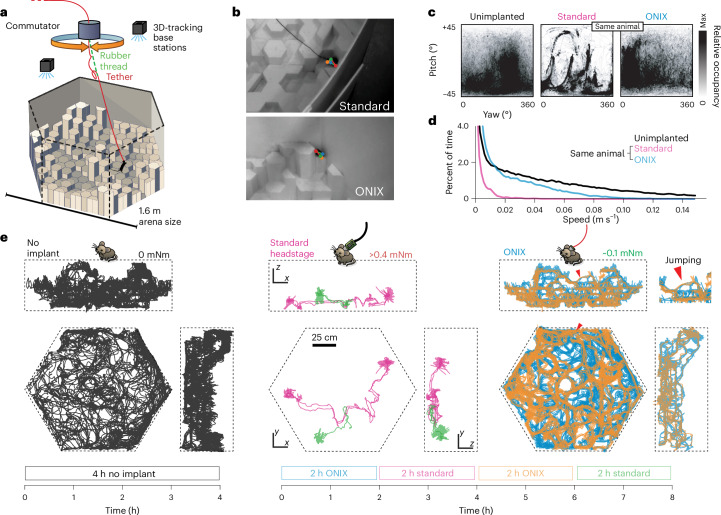
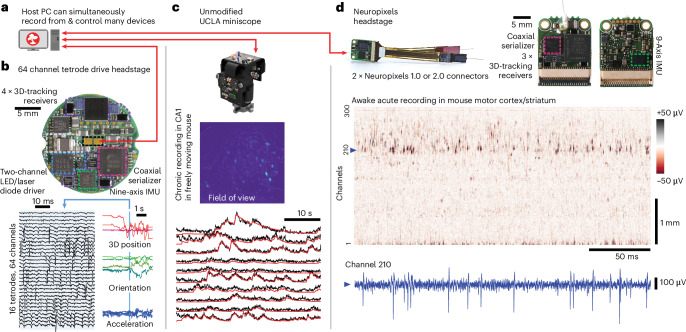
Behavioral neuroscience faces two conflicting demands: long-duration recordings from large neural populations and unimpeded animal behavior. To meet this challenge we developed ONIX, an open-source data acquisition system with high data throughput (2 GB s-1) and low closed-loop latencies (<1 ms) that uses a 0.3-mm thin tether to minimize behavioral impact. Head position and rotation are tracked in three dimensions and used to drive active commutation without torque measurements. ONIX can acquire data from combinations of passive electrodes, Neuropixels probes, head-mounted microscopes, cameras, three-dimensional trackers and other data sources. We performed uninterrupted, long (~7 h) neural recordings in mice as they traversed complex three-dimensional terrain, and multiday sleep-tracking recordings (~55 h). ONIX enabled exploration with similar mobility as nonimplanted animals, in contrast to conventional tethered systems, which have restricted movement. By combining long recordings with full mobility, our technology will enable progress on questions that require high-quality neural recordings during ethologically grounded behaviors.
© 2024. The Author(s).
Conflict of interest statement
Competing interests: J.P.N. is the president and J.V. and J.H.S. are board members of Open Ephys, a public benefit workers cooperative in Atlanta GA. F.C. is the founder of the Open Ephys Production Site in Lisbon Portugal. A.C.L. and F.C. are, and A.H.L was employed at the Open Ephys Production Site in Lisbon Portugal. G.L. is a director of NeuroGEARS. The other authors declare no competing interests.
Figures











Update of
-
A unified open-source platform for multimodal neural recording and perturbation during naturalistic behavior.bioRxiv [Preprint]. 2023 Sep 1:2023.08.30.554672. doi: 10.1101/2023.08.30.554672. bioRxiv. 2023. Update in: Nat Methods. 2025 Jan;22(1):187-192. doi: 10.1038/s41592-024-02521-1. PMID: 37693443 Free PMC article. Updated. Preprint.
References
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
