

Optimal Operation of Cryogenic Calorimeters Through Deep Reinforcement Learning
- PMID: 39539389
- PMCID: PMC11557640
- DOI: 10.1007/s41781-024-00119-y
Optimal Operation of Cryogenic Calorimeters Through Deep Reinforcement Learning
Abstract
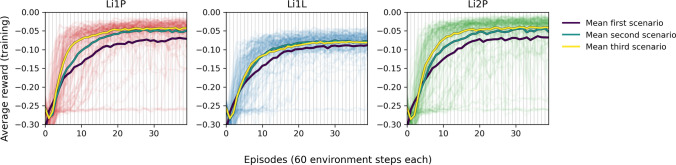
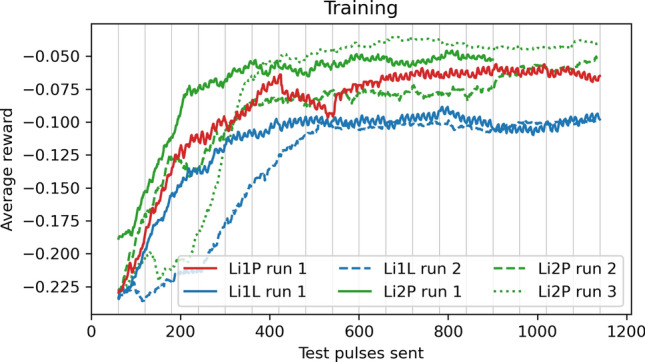
Cryogenic phonon detectors with transition-edge sensors achieve the best sensitivity to sub-GeV/c dark matter interactions with nuclei in current direct detection experiments. In such devices, the temperature of the thermometer and the bias current in its readout circuit need careful optimization to achieve optimal detector performance. This task is not trivial and is typically done manually by an expert. In our work, we automated the procedure with reinforcement learning in two settings. First, we trained on a simulation of the response of three Cryogenic Rare Event Search with Superconducting Thermometers (CRESST) detectors used as a virtual reinforcement learning environment. Second, we trained live on the same detectors operated in the CRESST underground setup. In both cases, we were able to optimize a standard detector as fast and with comparable results as human experts. Our method enables the tuning of large-scale cryogenic detector setups with minimal manual interventions.
Keywords: Cryogenic calorimeter; Dark matter; Reinforcement learning; Transition-edge sensor.
© The Author(s) 2024.
Conflict of interest statement
Competing interestsOn behalf of all authors, the corresponding author states that there is no conflict of interest. The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
Figures










References
-
- Irwin K, Hilton G (2005) Transition-edge sensors. In: Enss C (ed) Cryogenic particle detection. Springer, Berlin, pp 63–150. 10.1007/10933596_3 (ISBN 978-3-540-31478-3)
-
- Abdelhameed AH et al (2019) First results from the cresst-iii low-mass dark matter program. Phys Rev D 100:102002. 10.1103/PhysRevD.100.102002
-
- Cresst homepage. https://cresst-experiment.org/. Accessed 10 Apr 2024.
-
- Angloher G et al (2023) Results on sub-gev dark matter from a 10 ev threshold cresst-iii silicon detector. Phys Rev D 107:122003. 10.1103/PhysRevD.107.122003
-
- Billard J et al (2022) Direct detection of dark matter—APPEC committee report*. Rep Progr Phys 85(5):056201. 10.1088/1361-6633/ac5754 - PubMed
LinkOut - more resources
Full Text Sources