

An improved trajectory tracking control of quadcopter using a novel Sliding Mode Control with Fuzzy PID Surface
- PMID: 39570843
- PMCID: PMC11581241
- DOI: 10.1371/journal.pone.0308997
An improved trajectory tracking control of quadcopter using a novel Sliding Mode Control with Fuzzy PID Surface
Abstract
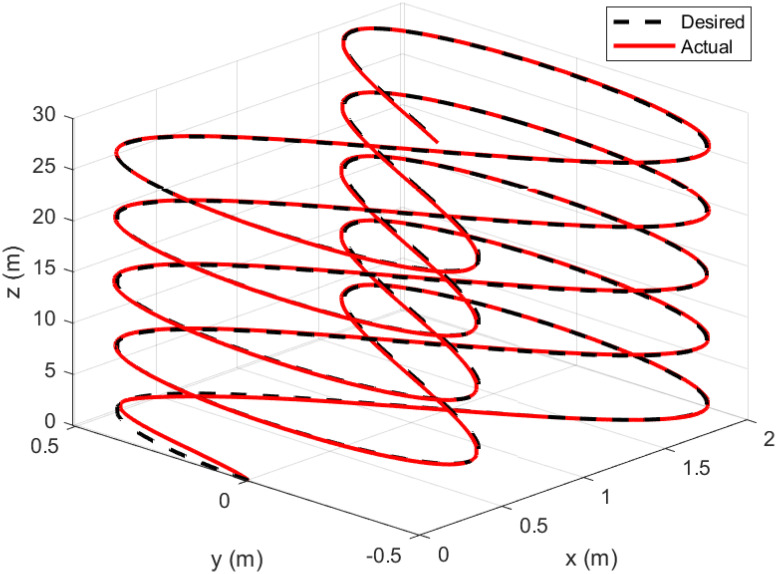
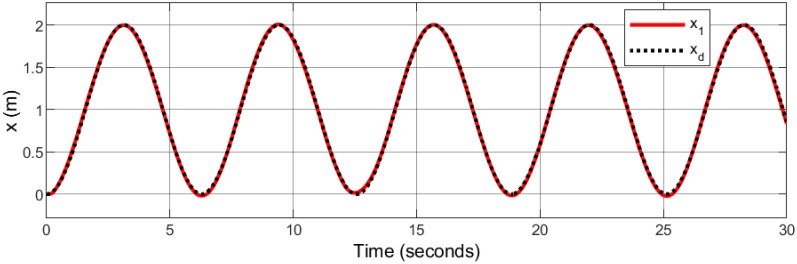
This paper presents Super Twisting Sliding Mode Control with a novel Fuzzy PID Surface for improved trajectory tracking of quadrotor unmanned aerial vehicles under external disturbances. First, quadrotor dynamic model with six degrees of freedom (6-DOF) is developed using Newton-Euler Method. Then, a robust Sliding Mode Control based on a new Fuzzy PID Surface is designed to be capable of automatically adjusting its gain parameters. The proposed SMC controller applies super twisting algorithm with PID surface to reduce chattering and a fuzzy logic controller to automatically adjust the gain parameters in order to enhance robustness. Furthermore, the solution to stability has been given by the Lyapunov method. The controller's performance is tested through various trajectories, parameter variations, and disturbance scenarios, comparing it with recent alternatives such as Sliding Mode Control, Fuzzy Sliding Mode Control, and Fuzzy Super Twisting Sliding Mode Control using numerical simulations. The simulation results show that the proposed controller has better tracking performance, parameter variation handling, and disturbance rejection capability compared with the aforementioned controllers. Additionally, the control efforts of the proposed method are minimal and smooth, proving it to be an economically feasible controller and operationally safe for the quadrotor.
Copyright: © 2024 Gedefaw et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures






























Similar articles
-
An improved nonsingular adaptive super twisting sliding mode controller for quadcopter.PLoS One. 2024 Oct 10;19(10):e0309098. doi: 10.1371/journal.pone.0309098. eCollection 2024. PLoS One. 2024. PMID: 39388422 Free PMC article.
-
Trajectory tracking and formation control of quadrotor UAVs based on modified super twisting sliding mode method.Sci Rep. 2025 Jul 5;15(1):24039. doi: 10.1038/s41598-025-10333-2. Sci Rep. 2025. PMID: 40617991 Free PMC article.
-
Adaptive fuzzy PID cross coupled control for multi-axis motion system based on sliding mode disturbance observation.Sci Prog. 2021 Apr-Jun;104(2):368504211011847. doi: 10.1177/00368504211011847. Sci Prog. 2021. PMID: 33913385 Free PMC article.
-
Novel Fuzzy PID-Type Iterative Learning Control for Quadrotor UAV.Sensors (Basel). 2018 Dec 21;19(1):24. doi: 10.3390/s19010024. Sensors (Basel). 2018. PMID: 30577657 Free PMC article.
-
UAV Trajectory Tracking Using Proportional-Integral-Derivative-Type-2 Fuzzy Logic Controller with Genetic Algorithm Parameter Tuning.Sensors (Basel). 2024 Oct 17;24(20):6678. doi: 10.3390/s24206678. Sensors (Basel). 2024. PMID: 39460158 Free PMC article.
Cited by
-
Research on anti-rollover active control of sports utility vehicle with time-delay compensation function.PLoS One. 2025 May 29;20(5):e0323996. doi: 10.1371/journal.pone.0323996. eCollection 2025. PLoS One. 2025. PMID: 40440403 Free PMC article.
References
-
- Gupta S.G., Ghonge M., Jawandhiya P.M. Review of unmanned aircraft system (UAS). Int. J. Adv. Res. Comput. Eng. Technol. (IJARCET). 2013;2. 10.2139/ssrn.3451039 - DOI
-
- Madebo M.M., Abdissa C.M., Lemma L.N., Negash D.S. Robust Tracking Control for Quadrotor UAV with External Disturbances and Uncertainties Using Neural Network Based MRAC. IEEE Access. 2024. doi: 10.1109/ACCESS.2024.3374894 - DOI
-
- Chen K., Ye C., Wu C., Wang H., Jin L., Zhu F., Hong H. A novel open-closed-loop control strategy for quadrotor trajectory tracking on real-time control and acquisition platform.Appl. Sci. 2023;13(5):3251. 10.3390/app13053251 - DOI
-
- Okyere E., Bousbaine A., Poyi G.T., Joseph A.K., Andrade J.M. LQR controller design for quad-rotor helicopters. The Journal of Engineering. 2019;2019(17):4003–4007. doi: 10.1049/joe.2018.8126 - DOI
-
- Eltayeb A., Rahmat M.F., Basri M.A.M., Eltoum M.A.M., Mahmoud M.S. Integral adaptive sliding mode control for quadcopter UAV under variable payload and disturbance. IEEE Access. 2022;10:94754–94764. doi: 10.1109/ACCESS.2022.3203058 - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
