Multi-Section Magnetic Soft Robot with Multirobot Navigation System for Vasculature Intervention
- PMID: 39610760
- PMCID: PMC11602701
- DOI: 10.34133/cbsystems.0188
Multi-Section Magnetic Soft Robot with Multirobot Navigation System for Vasculature Intervention
Abstract
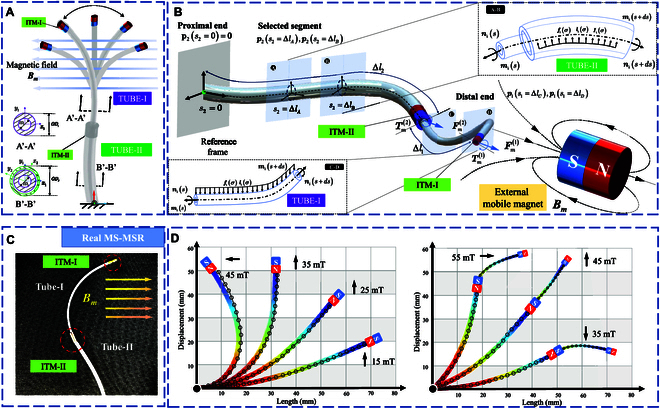
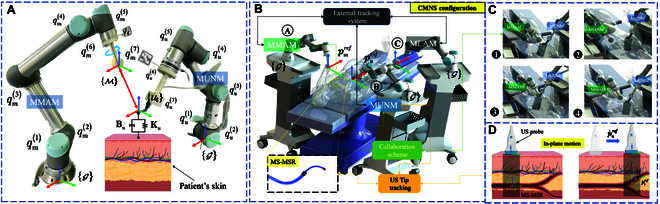
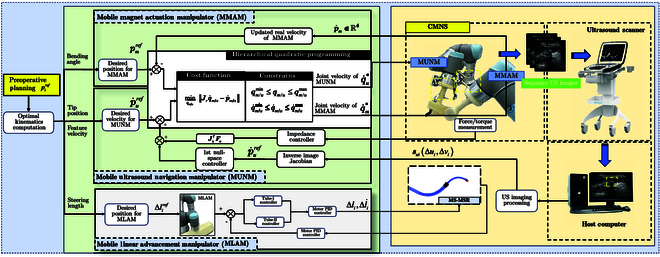
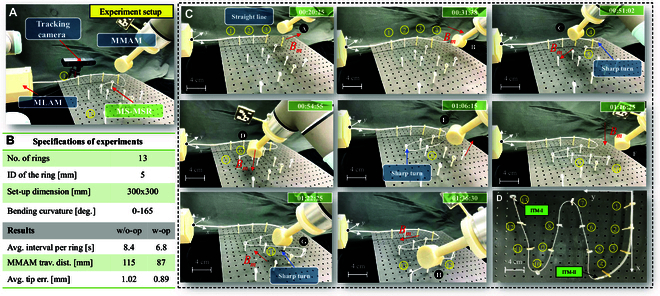
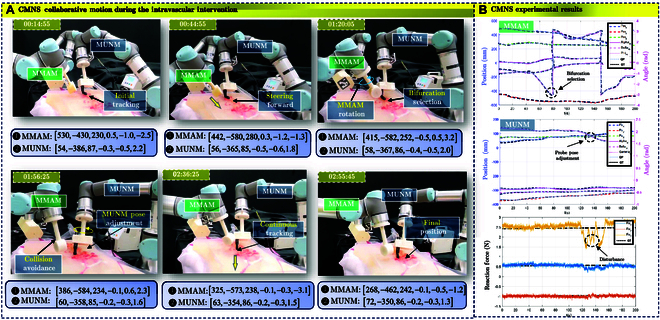
Magnetic soft robots have recently become a promising technology that has been applied to minimally invasive cardiovascular surgery. This paper presents the analytical modeling of a novel multi-section magnetic soft robot (MS-MSR) with multi-curvature bending, which is maneuvered by an associated collaborative multirobot navigation system (CMNS) with magnetic actuation and ultrasound guidance targeted for intravascular intervention. The kinematic and dynamic analysis of the MS-MSR's telescopic motion is performed using the optimized Cosserat rod model by considering the effect of an external heterogeneous magnetic field, which is generated by a mobile magnetic actuation manipulator to adapt to complex steering scenarios. Meanwhile, an extracorporeal mobile ultrasound navigation manipulator is exploited to track the magnetic soft robot's distal tip motion to realize a closed-loop control. We also conduct a quadratic programming-based optimization scheme to synchronize the multi-objective task-space motion of CMNS with null-space projection. It allows the formulation of a comprehensive controller with motion priority for multirobot collaboration. Experimental results demonstrate that the proposed magnetic soft robot can be successfully navigated within the multi-bifurcation intravascular environment with a shape modeling error and a tip error of under the actuation of a CMNS through in vitro ultrasound-guided vasculature interventional tests.
Copyright © 2024 Zhengyang Li and Qingsong Xu.
Conflict of interest statement
Competing interests: The authors declare that they have no competing interests.
Figures




References
-
- Abdelaziz MEMK, Tian L, Hamady M, Yang G-Z, Temelkuran B. X-ray to MR: The progress of flexible instruments for endovascular navigation. Prog Biomed Eng. 2021;3(3):032004.
-
- Pore A, Li Z, Dall’Alba D, Hernansanz A, de Momi E, Menciassi A, Casals Gelpí A, Dankelman J, Fiorini P, Poorten EV. Autonomous navigation for robot-assisted intraluminal and endovascular procedures: A systematic review. IEEE Trans Robot. 2023;39(4):2529–2548.
-
- Zhou JJ, Quadri A, Sewani A, Alawneh Y, Gilliland-Rocque R, Magnin C, Dueck A, Wright GA, Tavallaei MA. The CathPilot: A novel approach for accurate interventional device steering and tracking. IEEE/ASME Trans Mechatron. 2022;27(6):5812–5823.
LinkOut - more resources
Full Text Sources