

Liquid Crystal Elastomer for Compression Therapy
- PMID: 39632359
- PMCID: PMC11773120
- DOI: 10.1002/adhm.202402881
Liquid Crystal Elastomer for Compression Therapy
Abstract
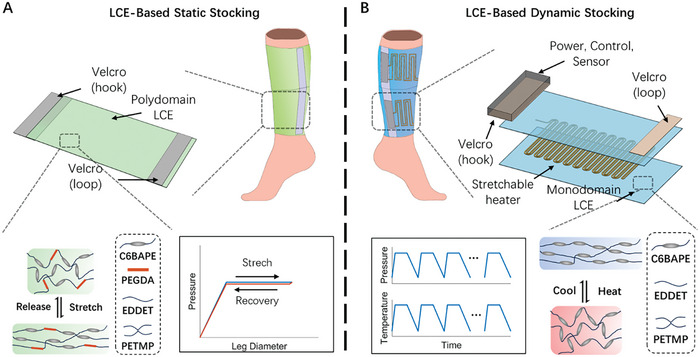
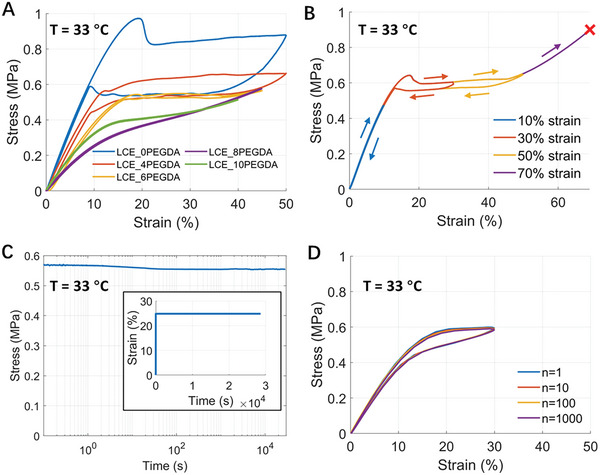
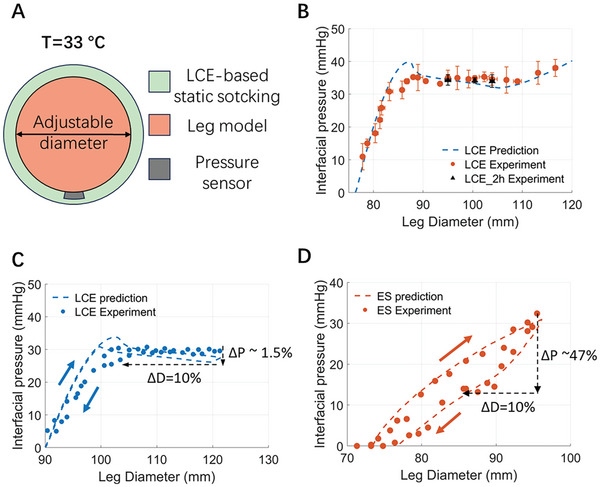
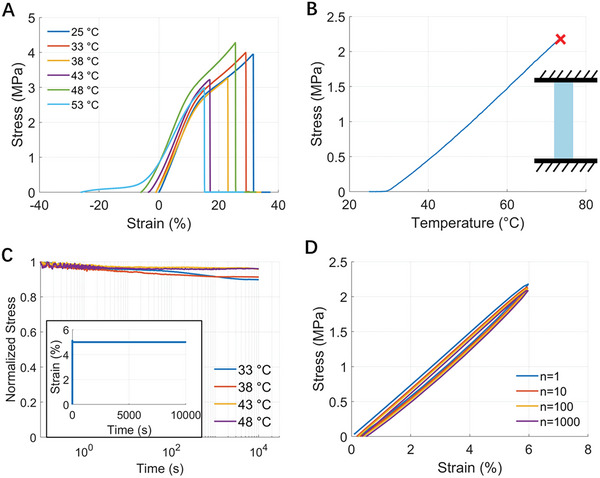
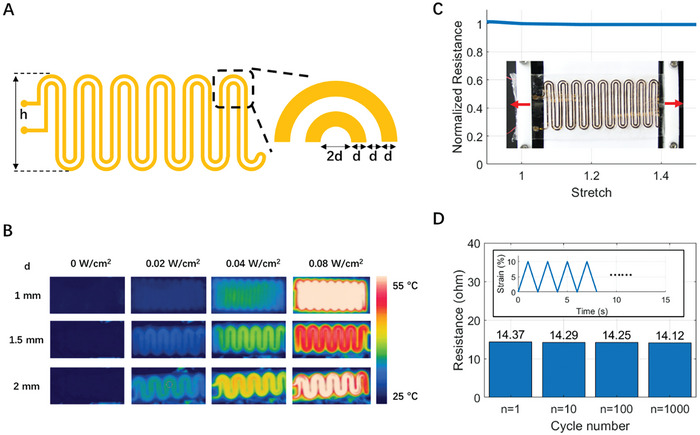
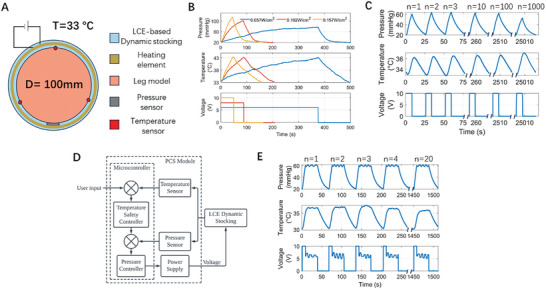
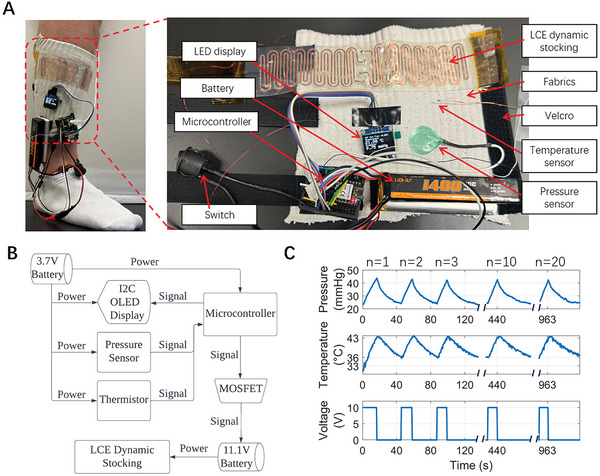
Compression therapy is a widely used treatment for various disorders including venous leg ulcers. Traditional methods such as inelastic bandages and elastic stockings, have limitations in maintaining optimal pressure over time. Dynamic therapy devices offer intermittent pressure cycles but are often bulky or rigid. Here liquid crystal elastomer (LCE) is proposed for both static and dynamic compression therapy. Due to the soft elasticity of polydomain LCE, LCE-based static stocking can maintain consistent pressure over a wide range of leg diameters, permitting the tolerance of stocking application inconsistencies, various limb sizes, and interfacial pressure drop due to leg deswelling. The LCE-based dynamic stocking consists of monodomain LCEs with reversible thermal actuation, heating elements, and electronics. The dynamic stocking generates intermittent pressure from 20 to 60 mmHg with a slight temperature increase above 33 °C and offers pressure profile programmability. Furthermore, an untethered LCE-based dynamic compression device on a human leg is demonstrated. Both LCE-based static and dynamic stockings show minimal stress relaxation and reusability over 1000 cycles, ensuring long-term use in compression therapy applications.
Keywords: compression therapy; dynamic stocking; liquid crystal elastomer; static stocking.
© 2024 The Author(s). Advanced Healthcare Materials published by Wiley‐VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Dissemond J., Assenheimer B., Bültemann A., Gerber V., Gretener S., Kohler‐von Siebenthal E., Koller S., Kröger K., Kurz P., Läuchli S., Münter C., Panfil E.‐M., Probst S., Protz K., Riepe G., Strohal R., Traber J., Partsch H., J. Deutsche Derma. Gesell. 2016, 14, 1072. - PubMed
-
- Zarchi K., Jemec G. B. E., JAMA Dermatol. 2014, 150, 730. - PubMed
-
- Todd M., Br. J. Nurs. 2011, 20, 681. - PubMed
-
- Webb E., Neeman T., Bowden F. J., Gaida J., Mumford V., Bissett B., N. Engl. J. Med. 2020, 383, 630. - PubMed
