

Active 3D positioning and imaging modulated by single fringe projection with compact metasurface device
- PMID: 39635136
- PMCID: PMC11501738
- DOI: 10.1515/nanoph-2023-0112
Active 3D positioning and imaging modulated by single fringe projection with compact metasurface device
Abstract
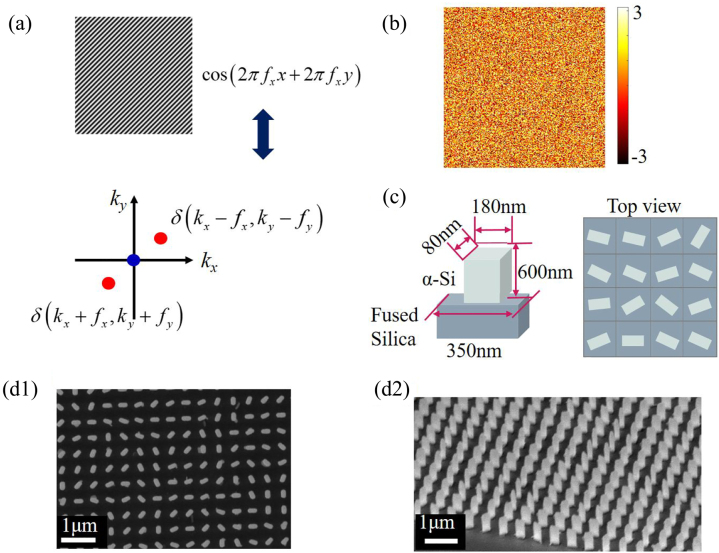
Three-dimensional (3D) information is vital for providing detailed features of the physical world, which is used in numerous applications such as industrial inspection, automatic navigation and identity authentication. However, the implementations of 3D imagers always rely on bulky optics. Metasurfaces, as the next-generation optics, shows flexible modulation abilities and excellent performance combined with computer vision algorithm. Here, we demonstrate an active 3D positioning and imaging method with large field of view (FOV) by single fringe projection based on metasurface and solve the accurate and robust calibration problem with the depth uncertainty of 4 μm. With a compact metasurface projector, the demonstrated method can achieve submillimeter positioning accuracy under the FOV of 88°, offering robust and fast 3D reconstruction of the texture-less scene due to the modulation characteristic of the fringe. Such scheme may accelerate prosperous engineering applications with the continued growth of flat-optics manufacturing process by using metadevices.
Keywords: depth sensing; geometric phase; metasurface.
© 2023 the author(s), published by De Gruyter, Berlin/Boston.
Figures




References
-
- Wu Z., Guo W., Pan B., Kemao Q., Zhang Q. A DIC-assisted fringe projection profilometry for high-speed 3D shape, displacement and deformation measurement of textured surfaces. Opt. Las. Eng. 2021;142:106614. doi: 10.1016/j.optlaseng.2021.106614. - DOI
-
- Royo S., Ballesta-Garcia M. An overview of lidar imaging systems for autonomous vehicles. Appl. Sci. 2019;9:4093. doi: 10.3390/app9194093. - DOI
-
- Kaul L., Zlot R., Bosse M. Continuous-time three-dimensional mapping for micro aerical vehicles with a passively actuated rotating laser scanner. J. Field Robot. 2016;33:103–132. doi: 10.1002/rob.21614. - DOI
-
- Ham Y., Han K. K., Lin J. J., Goparvar-Fard M. Visual monitoring of civil infrastructure systems via camera-equipped unmanned aerial vehicles (UAVs): a review of related works. Visual. Eng. 2016;4:1–8. doi: 10.1186/s40327-015-0029-z. - DOI
LinkOut - more resources
Full Text Sources