

Kinematics and energetics of the desert locust (Schistocerca gregaria) when jumping from compliant surfaces
- PMID: 39676724
- PMCID: PMC11698038
- DOI: 10.1242/jeb.248018
Kinematics and energetics of the desert locust (Schistocerca gregaria) when jumping from compliant surfaces
Abstract
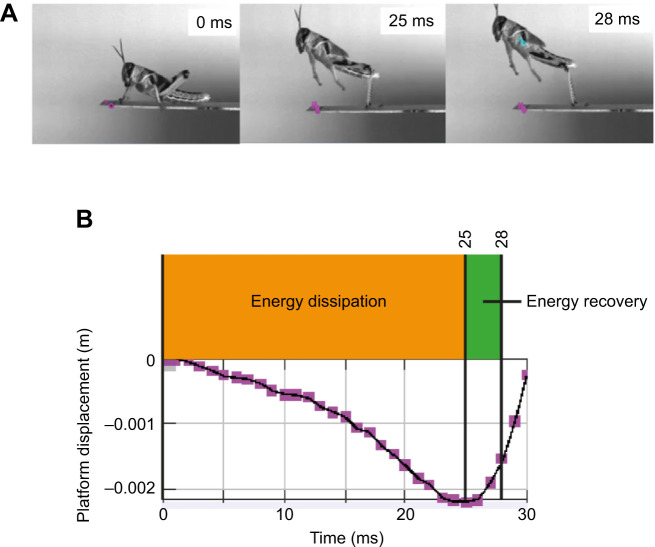
Animals often leap from substrates that give way under them, such as leaves, soft ground or flexible branches. This provides an added complexity for latch-mediated spring-actuated (LaMSA) jumping animals because the spring-loaded system often works so quickly that neural feedback cannot adjust for errors caused by a yielding substrate. We studied a LaMSA jumper, the grasshopper, to determine how the mechanical properties of a substrate giving way under them would affect the kinematics of the jump. We measured this by allowing grasshoppers to leap from two diving boards, a long one that could generate a whole range of relative stiffnesses, and a shorter, much lighter, but stiffer board. Substrate stiffness was manipulated by then placing the grasshopper on different locations on that diving board, presenting from 30% of the grasshopper's leg stiffness to 200 times the grasshoppers leg stiffness. For platform stiffnesses that were less than that of the grasshopper, take-off velocity and kinetic energy were reduced, but jump elevation (the jump trajectory) was unaffected. For stiffnesses that were greater than that of the grasshopper, there was no effect on take-off velocity and kinetic energy. When jumping from an extremely light and stiff substrate, recoil of the surface allowed the grasshopper to recover some of the lost energy. Consequently, when jumping from substrates that are less stiff than they are (such as floppy leaves), grasshoppers must contend with lower take-off velocities, but jump direction is unaffected.
Keywords: Biomechanics; Energy; Jumping; LaMSA; Locomotion; Locust.
© 2024. Published by The Company of Biologists Ltd.
Conflict of interest statement
Competing interests The authors declare no competing or financial interests.
Figures






References
-
- Bailey, N. T. J. (1981). Statistical Methods in Biology, 2nd edn. London: Hodder & Stoughton.
-
- Bates, D., Mächler, M., Bolker, B. and Walker, S. (2015). Fitting linear mixed-effects models using lme4. J. Stat. Softw. 67, 1-48. 10.18637/jss.v067.i01 - DOI
-
- Bennet-Clark, H. C., Chapman, R. F. and Joern, A. (1990). Jumping in orthoptera. In Biology of Grasshoppers (ed. Chapman R. F. and Joern A.), pp. 173-203. New York: John Wiley & Sons.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
