

Adaptive Optimization and Dynamic Representation Method for Asynchronous Data Based on Regional Correlation Degree
- PMID: 39685963
- PMCID: PMC11644753
- DOI: 10.3390/s24237430
Adaptive Optimization and Dynamic Representation Method for Asynchronous Data Based on Regional Correlation Degree
Abstract
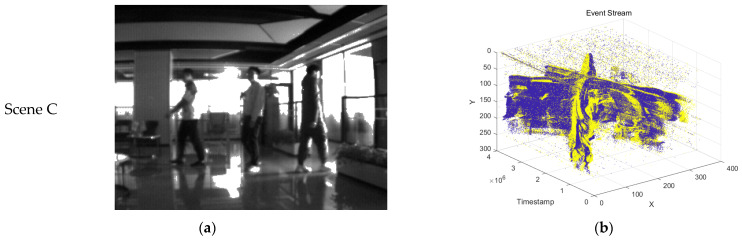
Event cameras, as bio-inspired visual sensors, offer significant advantages in their high dynamic range and high temporal resolution for visual tasks. These capabilities enable efficient and reliable motion estimation even in the most complex scenes. However, these advantages come with certain trade-offs. For instance, current event-based vision sensors have low spatial resolution, and the process of event representation can result in varying degrees of data redundancy and incompleteness. Additionally, due to the inherent characteristics of event stream data, they cannot be utilized directly; pre-processing steps such as slicing and frame compression are required. Currently, various pre-processing algorithms exist for slicing and compressing event streams. However, these methods fall short when dealing with multiple subjects moving at different and varying speeds within the event stream, potentially exacerbating the inherent deficiencies of the event information flow. To address this longstanding issue, we propose a novel and efficient Asynchronous Spike Dynamic Metric and Slicing algorithm (ASDMS). ASDMS adaptively segments the event stream into fragments of varying lengths based on the spatiotemporal structure and polarity attributes of the events. Moreover, we introduce a new Adaptive Spatiotemporal Subject Surface Compensation algorithm (ASSSC). ASSSC compensates for missing motion information in the event stream and removes redundant information, thereby achieving better performance and effectiveness in event stream segmentation compared to existing event representation algorithms. Additionally, after compressing the processed results into frame images, the imaging quality is significantly improved. Finally, we propose a new evaluation metric, the Actual Performance Efficiency Discrepancy (APED), which combines actual distortion rate and event information entropy to quantify and compare the effectiveness of our method against other existing event representation methods. The final experimental results demonstrate that our event representation method outperforms existing approaches and addresses the shortcomings of current methods in handling event streams with multiple entities moving at varying speeds simultaneously.
Keywords: event cameras; event representations; slicing methods.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures












References
-
- Lichtsteiner P., Posch C., Delbruck T. A 128 × 128 120 dB 15 μs latency asynchronous temporal contrast vision sensor. IEEE J. Solid-State Circuits. 2008;43:566–576. doi: 10.1109/JSSC.2007.914337. - DOI
-
- Brandli C., Berner R., Yang M., Liu S.-C., Delbruck T. A 240 × 180 130 db 3 µs latency global shutter spatiotemporal vision sensor. IEEE J. Solid-State Circuits. 2014;49:2333–2341. doi: 10.1109/JSSC.2014.2342715. - DOI
-
- Posch C., Matolin D., Wohlgenannt R. A QVGA 143 dB dynamic range frame-free PWM image sensor with lossless pixel-level video compression and time-domain CDS. IEEE J. Solid-State Circuits. 2010;46:259–275. doi: 10.1109/JSSC.2010.2085952. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
