

A Whole-Body Coordinated Motion Control Method for Highly Redundant Degrees of Freedom Mobile Humanoid Robots
- PMID: 39727770
- PMCID: PMC11673920
- DOI: 10.3390/biomimetics9120766
A Whole-Body Coordinated Motion Control Method for Highly Redundant Degrees of Freedom Mobile Humanoid Robots
Abstract
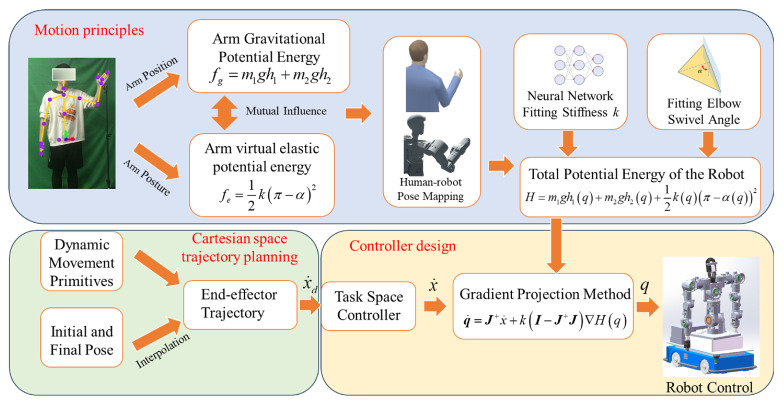
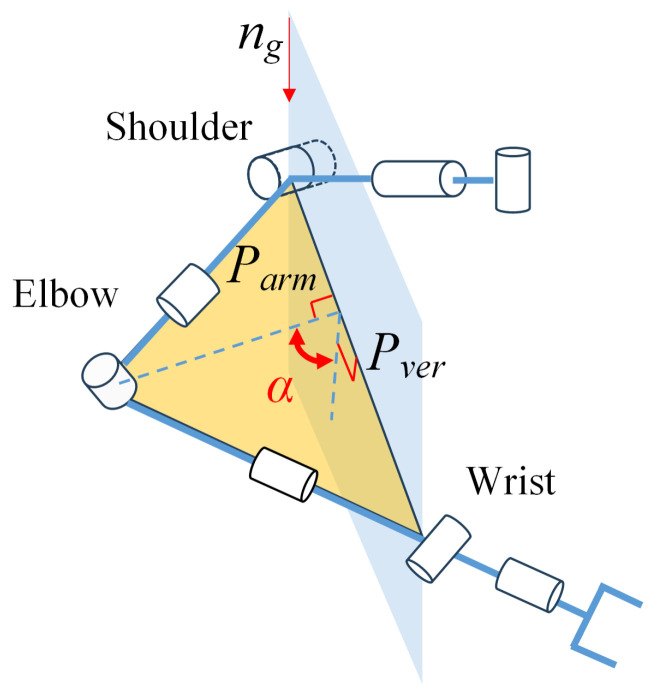
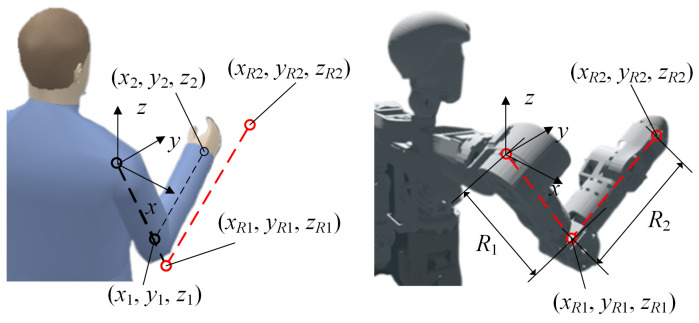
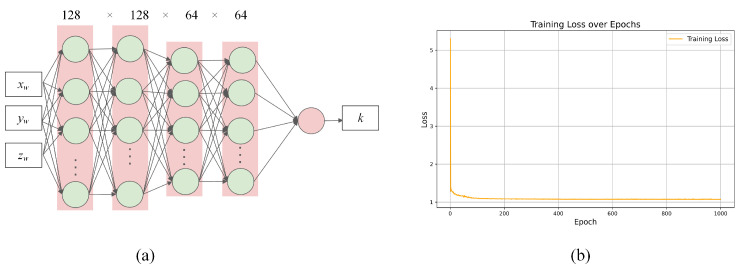
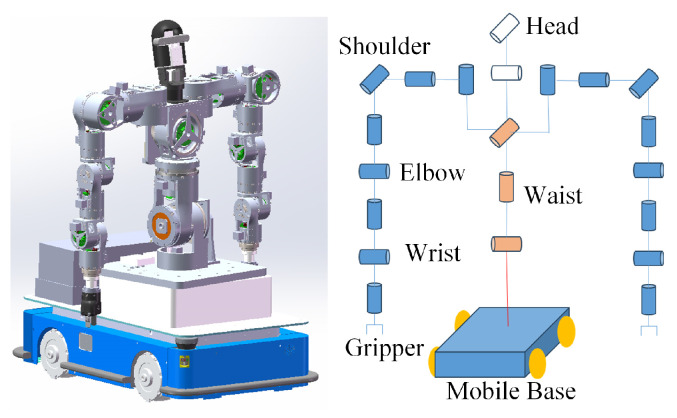
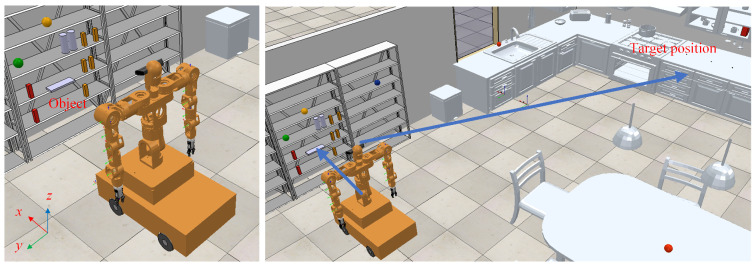
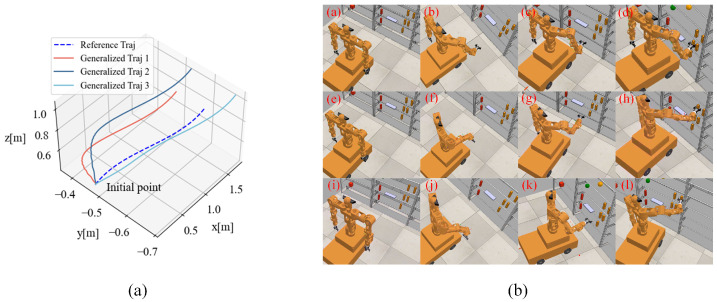
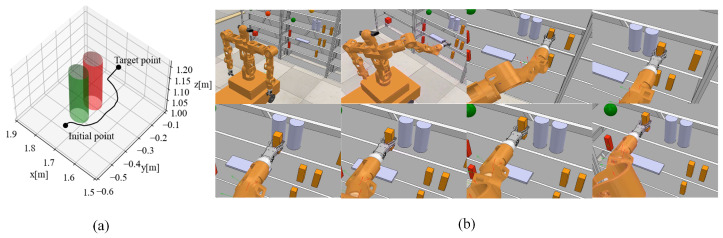
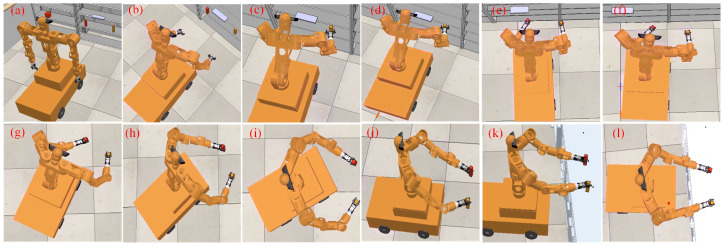
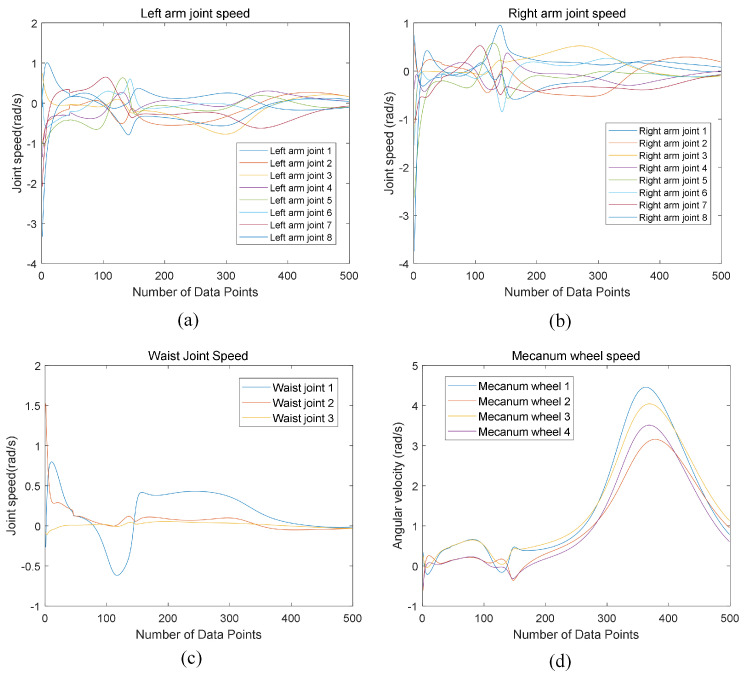
Humanoid robots are becoming a global research focus. Due to the limitations of bipedal walking technology, mobile humanoid robots equipped with a wheeled chassis and dual arms have emerged as the most suitable configuration for performing complex tasks in factory or home environments. To address the high redundancy issue arising from the wheeled chassis and dual-arm design of mobile humanoid robots, this study proposes a whole-body coordinated motion control algorithm based on arm potential energy optimization. By constructing a gravity potential energy model for the arms and a virtual torsional spring elastic potential energy model with the shoulder-wrist line as the rotation axis, we establish an optimization index function for the arms. A neural network with variable stiffness is introduced to fit the virtual torsional spring, representing the stiffness variation trend of the human arm. Additionally, a posture mapping method is employed to map the human arm potential energy model to the robot, enabling realistic humanoid movements. Combining task-space and joint-space planning algorithms, we designed experiments for single-arm manipulation, independent object retrieval, and dual-arm carrying in a simulation of a 23-degree-of-freedom mobile humanoid robot. The results validate the effectiveness of this approach, demonstrating smooth motion, the ability to maintain a low potential energy state, and conformity to the operational characteristics of the human arm.
Keywords: dynamic movement primitives; humanoid motion; mobile humanoid robot; whole-body motion control.
Conflict of interest statement
The authors have no competing interests to declare that are relevant to the content of this article.
Figures
References
-
- Xu Y., Chen Z., Deng C., Wang S., Wang J. LCDL: Toward Dynamic Localization for Autonomous Landing of Unmanned Aerial Vehicle Based on LiDAR–Camera Fusion. IEEE Sens. J. 2024;24:26407–26415. doi: 10.1109/JSEN.2024.3424218. - DOI
-
- Deng C., Wang S., Wang J., Xu Y., Chen Z. LiDAR Depth Cluster Active Detection and Localization for a UAV with Partial Information Loss in GNSS. Unmanned Syst. 2024 doi: 10.1142/S2301385025500293. - DOI
-
- Fan X., Shu X., Tu B., Liu C.Y., Ni F., Jiang Z. A humanoid robot teleoperation approach based on waist-arm coordination. Ind. Robot. 2023;50:804–813. doi: 10.1108/IR-12-2022-0306. - DOI
-
- Dragan A.D., Srinivasa S.S. Familiarization to Robot Motion; Proceedings of the 2014 9th ACM/IEEE International Conference on Human-Robot Interaction (HRI); Bielefeld, Germany. 3–6 March 2014; pp. 366–373.
-
- Kulić D., Venture G., Yamane K., Demircan E., Mizuuchi I., Mombaur K.D. Anthropomorphic Movement Analysis and Synthesis: A Survey of Methods and Applications. IEEE Trans. Robot. 2016;32:776–795. doi: 10.1109/TRO.2016.2587744. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
