

Exploiting 2D Neural Network Frameworks for 3D Segmentation Through Depth Map Analytics of Harvested Wild Blueberries (Vaccinium angustifolium Ait.)
- PMID: 39728221
- PMCID: PMC11676057
- DOI: 10.3390/jimaging10120324
Exploiting 2D Neural Network Frameworks for 3D Segmentation Through Depth Map Analytics of Harvested Wild Blueberries (Vaccinium angustifolium Ait.)
Abstract
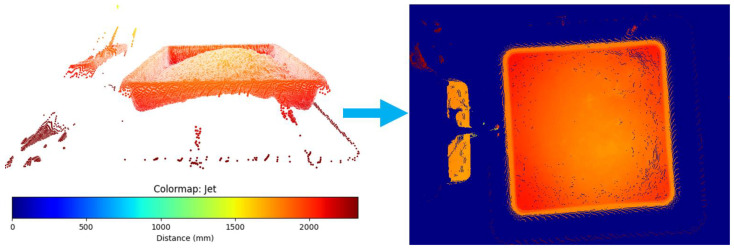
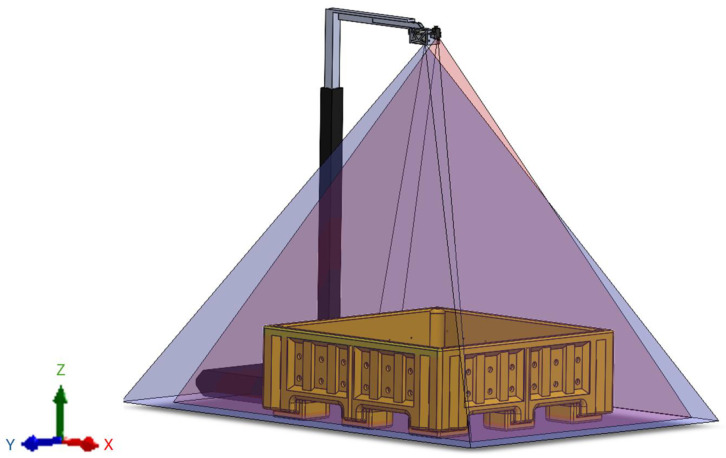
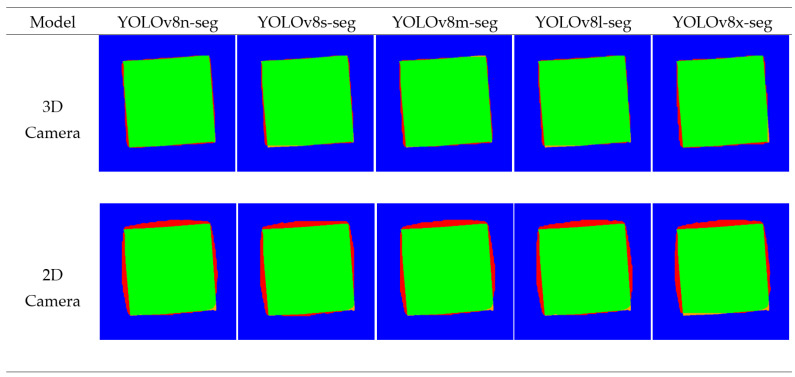
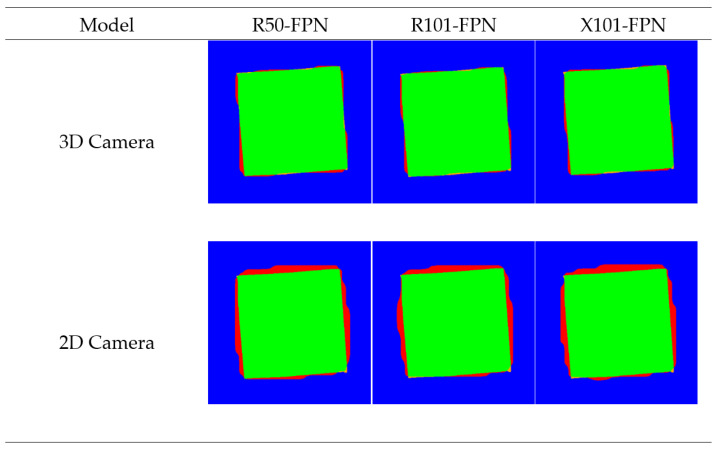
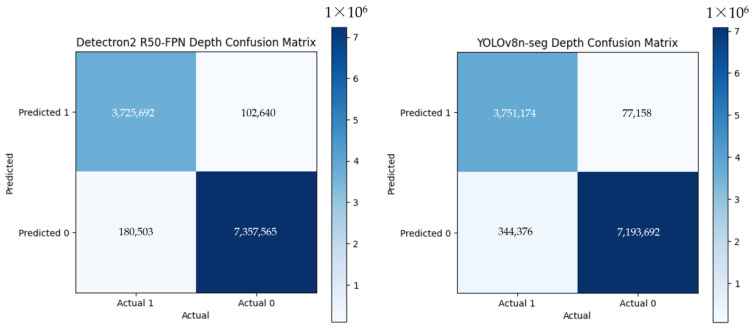
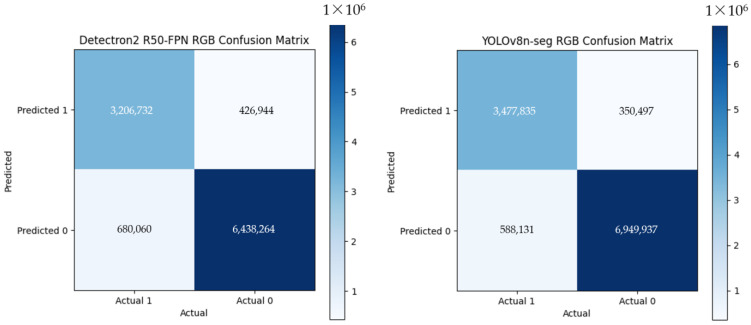
This study introduced a novel approach to 3D image segmentation utilizing a neural network framework applied to 2D depth map imagery, with Z axis values visualized through color gradation. This research involved comprehensive data collection from mechanically harvested wild blueberries to populate 3D and red-green-blue (RGB) images of filled totes through time-of-flight and RGB cameras, respectively. Advanced neural network models from the YOLOv8 and Detectron2 frameworks were assessed for their segmentation capabilities. Notably, the YOLOv8 models, particularly YOLOv8n-seg, demonstrated superior processing efficiency, with an average time of 18.10 ms, significantly faster than the Detectron2 models, which exceeded 57 ms, while maintaining high performance with a mean intersection over union (IoU) of 0.944 and a Matthew's correlation coefficient (MCC) of 0.957. A qualitative comparison of segmentation masks indicated that the YOLO models produced smoother and more accurate object boundaries, whereas Detectron2 showed jagged edges and under-segmentation. Statistical analyses, including ANOVA and Tukey's HSD test (α = 0.05), confirmed the superior segmentation performance of models on depth maps over RGB images (p < 0.001). This study concludes by recommending the YOLOv8n-seg model for real-time 3D segmentation in precision agriculture, providing insights that can enhance volume estimation, yield prediction, and resource management practices.
Keywords: Detectron2; YOLOv8; point clouds; precision agriculture; time of flight.
Conflict of interest statement
The authors declare no conflicts of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
Figures

References
-
- Esau T., Zaman Q., Groulx D., Farooque A., Schumann A., Chang Y. Machine Vision Smart Sprayer for Spot-Application of Agrochemical in Wild Blueberry Fields. Precis. Agric. 2018;19:770–788. doi: 10.1007/s11119-017-9557-y. - DOI
-
- Esau T.J., MacEachern C.B., Farooque A.A., Zaman Q.U. Evaluation of Autosteer in Rough Terrain at Low Ground Speed for Commercial Wild Blueberry Harvesting. Agronomy. 2021;11:384. doi: 10.3390/agronomy11020384. - DOI
-
- Zaman Q.U., Schumann A.W., Percival D.C. An Automated Cost-Effective System for Real-Time Slope Mapping in Commercial Wild Blueberry Fields. Horttechnology. 2010;20:431–437. doi: 10.21273/HORTTECH.20.2.431. - DOI
-
- Cong P., Zhou J., Li S., Lv K., Feng H. Citrus Tree Crown Segmentation of Orchard Spraying Robot Based on RGB-D Image and Improved Mask R-CNN. Appl. Sci. 2022;13:164. doi: 10.3390/app13010164. - DOI
LinkOut - more resources
Full Text Sources
